რობოტის შასის მართვის სქემა. ხელნაკეთი რობოტი: შასი და რობოტის დისკების კონტროლი. გამოყენებული ზოგიერთი ხელსაწყო და მოწყობილობა
ერთი ლითიუმ-იონური უჯრედის ნომინალური ძაბვა 18650 არის 3.6-3.7 ვ. სრულად დამუხტული უჯრედი გამოიმუშავებს 4.1-4.2 ვ. მაგრამ მინიმალური ძაბვის შემთხვევაში ეს უფრო რთულია - საბოლოო გამორთვის ძაბვა დამოკიდებულია ბატარეის ტიპზე და ეს მაჩვენებელი შეიძლება. მერყეობა 2,6-3,2 ვ-ის ფარგლებში. შეგიძლიათ დაცლა დაცლა, მაგრამ ეს არის ბატარეის სწრაფი დეგრადაციის უტყუარი გზა. გადავწყვიტე აკუმულატორის მიერ წარმოებული ძაბვის შეფასება ნომინალურ-მაქსიმალური დიაპაზონით გამეკეთებინა. შემდეგ გამოდის, რომ ორი, სამი და ოთხი სერიის აკუმულატორის შეკრება გვაძლევს დიაპაზონს 7.2-8.4 V, 10.8-12.6 V, 14.4-16.8 V. ასეთი შეკრებისგან უნდა მივიღოთ ორი ძაბვა - გარკვეული ძაბვა, რომ ძაბვა მიეცეს. ძრავები და 5 V ელექტრონიკის გასაძლიერებლად. ორი აკუმულატორის ერთობლიობას შეუძლია ძრავები 6 ვ ძაბვის ძაბვაში მყოფი DC/DC გადამყვანის გამოყენებით, მაგრამ განსხვავება მინიმალურ ძაბვის მნიშვნელობას შორის (როდესაც ბატარეა დაცლილია ნომინალურ მნიშვნელობამდე, ეს იქნება 7.2 ვ) და 6 ვ. დაახლოებით 1,2 ვ, რაც შეიძლება არ იყოს საკმარისი ნელ-ნელა დაქვეითებული DC/DC გადამყვანის სტაბილური მუშაობისთვის - პრობლემების თავიდან ასაცილებლად, აუცილებელია ძაბვის სხვაობა მის შეყვანასა და გამომავალს შორის მინიმუმ 2 ვ (სინამდვილეში, ეს შეიძლება იყოს იყოს ნაკლები დაბალი მიწოდების გადამყვანებისთვის, მაგრამ ჩვენ მათზე არ გავამახვილებთ ყურადღებას). ჩვენთვის საკმაოდ შესაფერისია სამი ელემენტის შეკრება, ჩვენ მივიღებთ აუცილებელ ძაბვებს ქვევით DC/DC გადამყვანების გამოყენებით. ძრავები შეიძლება იკვებებოდეს 9 ვ-ზე, შემდეგ უარეს შემთხვევაში მივიღებთ განსხვავებას 1.8 ვ, რაც სავსებით საკმარისი უნდა იყოს. ოთხი ელემენტის შეკრება ასევე შესაფერისია, მაგრამ თქვენ უნდა გესმოდეთ, რომ დამატებითი ბატარეა ნიშნავს დამატებით წონას და იკავებს ადგილს, თუმცა მას ასევე აქვს ენერგიის უფრო მაღალი მოხმარება მთელი ბატარეისთვის.
ელექტრომომარაგების ორგანიზების მეორე გზა არის იგივე ბატარეების პარალელური კავშირების გამოყენება და გამაძლიერებელი DC/DC გადამყვანი. შემდეგ 3.6-4.2 ვ-დან ძაბვა შეიძლება გაიზარდოს 5 ვ-მდე ელექტრონიკისთვის და 6-9 ვ-მდე ძრავებისთვის. როგორც ჩანს, ასეთი ბატარეის ტევადობა შეიძლება ადვილად შეიცვალოს ახალი უჯრედების დამატებით, მაგრამ არ უნდა დაგვავიწყდეს, რომ გამოყენებულ ბატარეებს უნდა ჰქონდეთ მსგავსი სიმძლავრე და შიდა წინააღმდეგობა.
არსებობს სპეციალური საკონტროლო დაფები სერიული ან პარალელური ბატარეების დატენვის/დამუხტვისთვის. დამცავი კონტროლერები იცავს ბატარეის კრებულს გადაჭარბებული დატენვის ან განმუხტვისგან (ძაბვის კონტროლი), მოკლე ჩართვისა და დასაშვები გამონადენის დენის გადამეტებისგან. ასეთი მარტივი დაფების გამოყენებისას საჭიროა გარე კვების წყარო დატენვის დენის შეზღუდვით. დამუხტვის/დამუხტვის კონტროლერებს შეუძლიათ დამოუკიდებლად დატენონ ბატარეები cc/cv მეთოდით დატენვის შეზღუდული დენით. ბატარეების სერიული კავშირის გაფართოებულ კონტროლერებს ასევე შეუძლიათ უზრუნველყონ თითოეული ბატარეის ინდივიდუალური დამუხტვა - ისინი აბალანსებენ ბატარეის უჯრედებს.
მე ავირჩიე სერიული ბატარეის კავშირის სქემა დამცავი დაფის და გარე დამტენის გამოყენებით. მომავალში, ასეთი მარტივი საკონტროლო დაფა შეიძლება შეიცვალოს დატენვის კონტროლერით დაბალანსებით. მიუხედავად იმისა, რომ პარალელური კავშირით, დაბალანსება არ არის საჭირო, უნდა გავითვალისწინოთ, რომ თუ ერთი ბატარეა ძლიერ არის გაცვეთილი, კონტროლერი ვერ შეძლებს ამის აღმოჩენას და ეს შეიძლება იყოს სავსე. ასევე გასათვალისწინებელია ის ფაქტი, რომ თითოეული ბატარეის მუშაობის რეჟიმები განსხვავებული იქნება. მაგალითად, იმავე სიმძლავრის გაყვანისას, პარალელურ კავშირში მყოფი ბატარეები უფრო მეტ დენის მიწოდებას მოუწევთ, ვიდრე პარალელურ კავშირში.
ამიტომ, ძრავები, რომელთა ნომინალური ძაბვაა 6 ვ და სამუშაო დიაპაზონი 3-9 ვ, შესაფერისია მე ავირჩიე ძრავა 281 rpm სიჩქარით და უმოქმედო მოხმარებით 80 mA. დატვირთვისას სიჩქარე ეცემა 238 rpm-მდე, დენი იზრდება 380 mA-მდე, ხოლო ძრავა გამოიმუშავებს 2 W სიმძლავრეს და ავითარებს ბრუნვას 0,5 კგ*სმ. ძრავის გაჩერებისას ბრუნვის მომენტი იზრდება 4 კგ*სმ-მდე, ხოლო დენი 900 mA-მდე. ყველა ეს მახასიათებელი აღებულია პროდუქტის ერთ-ერთი გამყიდველის ვებსაიტზე განთავსებული ფირფიტიდან, რადგან მე ვერ ვიპოვე ნორმალური "მონაცემთა ფურცელი".
კორპუსის და შასის შეკრება
შევუკვეთე შემდეგი ძრავები.
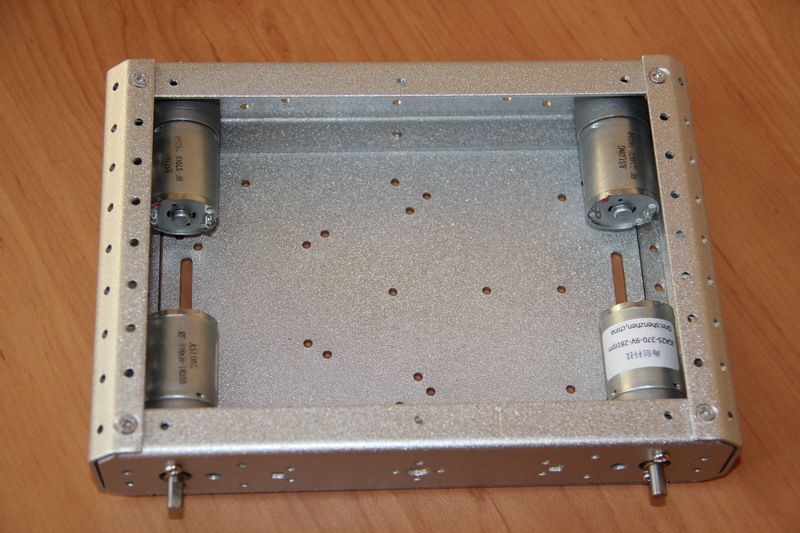
თუ დააკვირდებით სურათს, ხედავთ ძრავებიდან გამოსულ ლილვებს. ამ ძრავებისთვის ნაპოვნი იქნა შეერთების და ბორბლების ნაკრები.

დისკები 80 მმ დიამეტრით, რბილი, საბურავები.


ბაზის გაკეთებას თავად ვაპირებდი ფართო ალუმინის კუთხიდან (ან მსგავსი რამ, რაც ტექნიკის მაღაზიებში გვხვდება), რისი დახმარებითაც გავაკეთებდი „გვერდით“ ჩარჩოს, რომელიც დაფარული იქნებოდა მსუბუქი, გამძლე ლითონის ფირფიტებით. სწორ ადგილებში იჭრება ნახვრეტები და საჭიროებისამებრ იჭრება ძაფები. თუმცა, ჯერ გადავწყვიტე მომეძია, რა შესთავაზა ჩინურ ინდუსტრიას. და ვიპოვე ნაკრები - შასის ნაკრები რობოტის ასაშენებლად, რომელიც მოიცავდა თავად სხეულს, ზემოხსენებულ ძრავებს, შეერთებებს და ბორბლებს, ასევე ბატარეის განყოფილებას AA ბატარეებისთვის, დენის ჩამრთველს, დენის სოკეტს და შესაკრავებს. სხეულს აქვს მრავალი ნახვრეტი, რაც ლოგიკურად ამსუბუქებს მას და მათი არსებობა მინიმუმამდე უნდა დაიყვანოს სანტექნიკის სამუშაოების რაოდენობა.


შიდა სივრცის ზომისა და მოცულობის შეფასებისას (ამავდროულად, პლატფორმისთვის შეირჩა ელექტრონიკა, რომელიც ამ საქმეში უნდა მოთავსებულიყო), შევუკვეთე ეს ნაკრები. ჩამოსულ ძრავებზე, როგორც ზემოთ ხედავთ, რატომღაც წერია JGA25-370-9v-281rpm. არ მესმის რატომ ზუსტად 9ვ, როცა ამ ქვეჯგუფის ნომინალური ღირებულება 6 ვ-ია, მაგრამ, ალბათ, ჩინელებმა უკეთ იციან რა დაწერონ, რომ უკეთ გაიყიდოს.
თავად კორპუსი იწონის თითქმის 400 გრამს. ძნელია პასუხის გაცემა, თუ რა მასალისგან არის დამზადებული, მაგრამ არ ჰგავს სუფთა ალუმინს.




ამოიღეთ საფარი და დააინსტალირეთ ძრავები. ძრავებისთვის ხვრელებს აქვს დიამეტრი მხოლოდ M3 ხრახნებისთვის, პოზიციის რეგულირებისთვის ზღვარი არ რჩება, მაგრამ, სამართლიანი რომ ვიყოთ, ამან არანაირი პრობლემა არ გამოიწვია - ხვრელები აშკარად ემთხვევა ძრავის კორპუსის ძაფებს.


ვამონტაჟებთ შეერთებებს.


და დაამაგრეთ ბორბლები.


შედეგი არის დასრულებული პლატფორმა მიწის კლირენსით დაახლოებით 23 მმ.

"უსაქმური" შასის წონა კილოგრამზე ცოტა მეტი იყო. გახსოვთ სურათები ცალკეული ნაწილების მასის გაზომვით? 393+(58+85+20)*4 = 1045 გრამი. ყველაფერი აწყობილი იწონის 1057 გრამს. 12 გრამს დაემატა 16 ჭანჭიკი.

ასე გამოვიდა, საკმაოდ ლამაზი პლატფორმა.

ელექტრული დიაგრამა
აქ ღირს მნიშვნელოვანი პუნქტის ახსნა, თუ რატომ არის ეს კონკრეტული ვეშაპი. ფაქტია, რომ თუ ჩვენ თვითონ ვაკეთებთ საქმეს, მაშინ მისი შიდა მოცულობა შეიძლება თვითნებურად იქცეს. შეძენილი ქეისი გვაწვდის მკაცრად ფიქსირებულ მოცულობას, რომელშიც ყველაფერი უნდა მოთავსდეს. იდეალურ შემთხვევაში, რეზერვიც დარჩება. ეს თავიდანვე უნდა იქნას გათვალისწინებული და გასაგები: ჯდება თუ არა საჭირო შევსება ამ კონკრეტულ შემთხვევაში და საჭირო იქნება თუ არა ელექტრონიკის შეცვლა ან სხვა ქეისის არჩევა. კორპუსის შიგნით დამონტაჟდება: ძრავები, ბატარეა, ძრავების დრაივერი, დენის დაფა, რომელზედაც განთავსდება რაიმე სახის ელექტრონიკა - იგივე ძაბვის გადამყვანები.როგორც ჩანს, გასაგებია, რა გვექნება შიგნით. მაგრამ როგორ დააკავშირებს ეს ყველაფერი? თუ თქვენ გაქვთ იდეა, მაგრამ ვერ შექმნით მის იმიჯს, თქვენ არ გაქვთ იდეა. ელექტრონიკაში გამოდის, რომ ორი სურათი უნდა იყოს - ვიზუალური, რომელიც უკვე სრულად წარმოგვიდგენია, და ელექტრო (სინამდვილეში, არის ასევე ალგორითმული - როდესაც აღწერილია მოწყობილობის ქცევა, რომელიც განისაზღვრება მისი ტექნიკის და/ან პროგრამული უზრუნველყოფის (firmware ფუნქციონალობის) შესაძლებლობები).
საკმაოდ დიდ დროს ვატარებ სამსახურში გადაადგილებაში. ზოგადად, სწორი მიდგომით, გრძელი მოგზაურობა შეიძლება პლიუსად იქცეს წიგნების კითხვით, პოპულარული სამეცნიერო პროგრამების ან აუდიო წიგნების ყურებით/მოსმენით, რომლებსაც არასოდეს წაიკითხავდი, მოუსმენდი ან უყურებდი. სწორედ ამ პირობების წყალობით გავხდი ფანი და მოვუსმინე მოდელის ყველა ისტორიას ასამბლეისთვის (ისე, რომ კომენტარებში კითხვები არ იყო -). გამონაკლისი არც რობოტული გარყვნილება იყო და მოვიფიქრე და გზაზე პლატფორმის სქემატური დიაგრამა დავხატე.
დიაგრამა შედგენილია OneNote-ში. სურათის დაწკაპუნება შესაძლებელია. დიახ, მრცხვენია - მიკროსქემის სქემა არაპრინციპულად გამოიყურება. ბოლო სამი კვირაა სტატიის გაპრიალებას დრო ვერ ვუთმობ და უკვე გაჩნდა კითხვა: გამოვაქვეყნო რამე საერთოდ თუ გადავდო „მოგვიანებით“. გადავწყვიტე გამომექვეყნებინა ეს ასე, თორემ „მოგვიანებით“ შეიძლება სახიფათო იყოს. დავხატავ ნორმალურ დიაგრამებს და შევცვლი სურათებს. მეორეს მხრივ, ეს დიზაინი ორიგინალურ წვრილმანს ჰგავს. სამსახურში თუ სახლში, როცა იდეა ჩამოყალიბდება, ჯერ აიღეთ ჩვეულებრივი ფურცელი და ჩვეულებრივი ფანქარი...
მოდით შევხედოთ სქემატურ დიაგრამას, თუ რას დავუკავშირდებით და რას. სამი 18650 ბატარეა დაკავშირებულია ლითიუმ-იონური ბატარეის კონტროლერთან D1 მთელ წრედს აქვს „საერთო საფუძველი“, რომელსაც უკავშირდება P- კონტროლერი D1. გამომავალი P+, FU1 და გადამრთველი SW, დაკავშირებულია DC/DC გადამყვანების D3 და D4 შეყვანებთან. კონვერტორი D3 წარმოქმნის ძაბვას ძრავებისთვის, D4 - ყველა ელექტრონიკის კვებისათვის. ამ კონვერტორების გამოსავალი უკავშირდება ძრავის დრაივერს D5, რომელსაც უკავშირდება ძრავები. მარცხენა მხარის ML1, ML2 ძრავები უკავშირდება MA არხს, ხოლო მარჯვენა მხარის MR1, MR2 ძრავები უკავშირდება MB არხს. დრაივერი ორარხიანია, რაც ნიშნავს, რომ შესაძლებელი იქნება ძრავების ორი ჯგუფის (არხი A და B) კონტროლი, მაგრამ არა თითოეული ძრავის ცალკე. პორტები ENA, ENB, IN1-IN4 გამოიყენება ძრავების ბრუნვის სიჩქარისა და მიმართულების გასაკონტროლებლად. რეზისტენტული წრე, რომელიც წარმოქმნის Vbat' ძაბვას, შეირჩევა ისე, რომ ჩამოყალიბდეს ბატარეის პაკეტის Vbat ძაბვის ტელემეტრია 0...5 ვ დიაპაზონში. თუ Vbat = 13 V (რაც ასე არ უნდა იყოს, რადგან ბატარეის პაკეტს შეუძლია მაქსიმუმ 12.6 V-ის გამომუშავება, მაგრამ მე ამას უსაფრთხოდ ვთამაშობდი), მაშინ Vbat' = 3.94 V (ანუ, მნიშვნელობა გარანტირებულია რომ არ წავა. 5 ვ ლიმიტის მიღმა). დენი, რომელიც მიედინება რეზისტენტულ წრეში 12 ვ-ზე იქნება 3,6 mA-ის ტოლი და მე მივიჩნიე ეს დანაკარგები მისაღები (დაახლოებით 0,1% ბატარეის ტევადობით 3000 mAh). გარე დენის მიწოდების სოკეტი დაკავშირებულია კონტროლერის შესასვლელთან D1. მაგრამ, დიაგრამიდან ვხედავთ, რომ ის დაკავშირებულია რელე D2-ის საშუალებით.
პირველ რიგში, მინდა ავხსნა 10 kOhm რეზისტორის არსებობა, რომელიც აყვანს დენის კონექტორის ერთ-ერთ ქინძისთავს 5 ვ ძაბვას. ჩვენ გვაქვს დენის კონექტორი სამი გამომავალი. გამომავალი წყვილი გადასცემს ელექტრომომარაგების ძაბვას. მესამე გამომავალი არის ინფორმაციული. ის იკეტება ნეგატიურ გამომავალზე (მიწაზე გვაქვს დაკავშირებული) თუ არ არის შტეფსელი და იხსნება თუ შტეფსელი ჩასმულია. ამრიგად, ვიღებთ ტელემეტრიულ სიგნალს Vinon' დენის წყაროს შეერთების შესახებ: თუ ძაბვა Vinon' = 0, მაშინ გარე დენი არ არის დაკავშირებული, თუ Vinon' = 5 V, მაშინ ის დაკავშირებულია. 10 kOhm-იანი რეზისტორი ამ გამომავალს 5 ვ-მდე აყვანს. დანამატის შეერთებისას რეზისტორში 0,5 mA დენი გაივლის, რაც სავსებით მისაღებია.
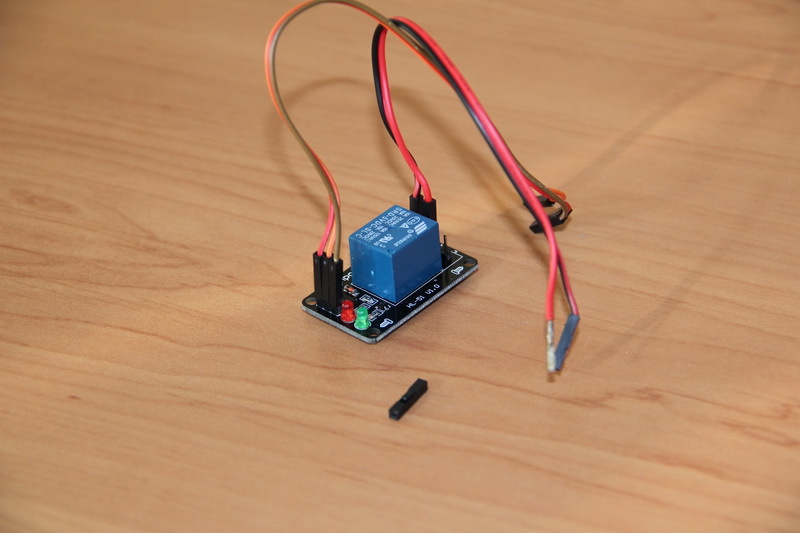
როდესაც გარე წყარო უკავშირდება ჩვეულებრივ დახურულ რელეს D2 და დაუკრავენ FU1-ს, ბატარეები დაიწყებენ დატენვას. ჩვეულებრივ დახურული რელე ნიშნავს, რომ მისი გამოსავალი ყოველთვის დახურულია და ღიაა მხოლოდ მაშინ, როდესაც ძაბვა გამოიყენება საკონტროლო კონტაქტზე. რატომ რელე D2? ვთქვათ, ჩვენ არ გვაქვს ეს რელე. თუ ელექტრომომარაგება დაკავშირებულია პლატფორმაზე, მაგრამ დაგავიწყდათ მისი შეერთება სოკეტში, როგორ გაიგებს მიკროკონტროლერის დაფა, იტენება თუ არა ბატარეის პაკეტი? რა მოხდება, თუ დენის წყარო ჩართულია გამოსასვლელში, მაგრამ არ გამოდის ძაბვა? ანუ ყველაფერი მუშაობს, მაგრამ დენის წყარო გამოსცემს მხოლოდ 10 ვ-ს საჭირო 12 ვ-ის ნაცვლად? და, თუ ასეთ წყაროს (რომელიც მხოლოდ 10 ვ-ს გამოიმუშავებს) დავუკავშირებ ბატარეას, რომელიც ჯერ კიდევ არ არის დატვირთული და გამოიმუშავებს 11 ვ-ს, მაშინ როგორ გავიგო, რომ ეს 11 ვ წარმოიქმნება ბატარეის პაკეტიდან (რომელიც რეალურად არ გამოდის 10 ვ-ზე მაღალი) თუ გარე წყარო? ასეთი სიტუაციებისთვის გააზრებული იყო ალგორითმი, რისთვისაც საჭირო იყო რელე. ჩვენ ვსწავლობთ გარე კვების წყაროს დაკავშირებას ვინონის ტელემეტრიიდან. ჩვენ გამორთეთ რელე და ვუყურებთ ვინის ტელემეტრიას. თუ ჯდება და ეს ძაბვა მოსალოდნელ დიაპაზონშია, მაშინ ჩავრთავთ რელეს და ვანიშნებთ დატენვის პროცესს. თუ თქვენ არ ხართ კმაყოფილი, ჩვენ არ ჩავრთავთ რელეს და არ ვაძლევთ სიგნალს გაუმართაობაზე. ნება მიეცით ბორტ საკონტროლო დაფას გაუმკლავდეს ანალიზისა და ჩვენების პროცესს და არა პლატფორმას. ამისათვის ჩვენ მას გადავცემთ ყველა საჭირო ძაბვას და საკონტროლო სიგნალს ვინოფის რელესთვის. სარელეო მოდულის საკონტროლო შეყვანა იწევს 5 ვ-მდე 10 kOhm რეზისტორის მეშვეობით, რაც უზრუნველყოფს რელეს მუდმივად ჩართვისას. როდესაც 0 ვ გამოიყენება ამ შეყვანაზე, რელე გამოირთვება.
მაგრამ რატომ არის ზუსტად ანტიდილუვიური მექანიკური რელე? ყოველივე ამის შემდეგ, შეგიძლიათ დააინსტალიროთ MOSFET ტრანზისტორი. იყო ასეთი იდეა, მაგრამ მე უნდა მიმეტოვებინა. თანამედროვე MOS ტრანზისტორებს აქვთ დაბალი წინააღმდეგობა (ათობით მილიოჰმი) ღია მდგომარეობაში და როდესაც დენი მიედინება 2-5 A, არ იქნება ძალიან მნიშვნელოვანი ძაბვის ვარდნა და, შედეგად, გათბობა - ტრანზისტორის სხეულს შეუძლია გაანადგუროს მცირე სიმძლავრე, თუნდაც რადიატორის გარეშე. მაგრამ ეს ყველაფერი ეხება წრედს, რომელშიც ასეთი ციფრული გასაღები გააკონტროლებს დენის წყაროს კავშირს პასიურ დატვირთვასთან. ტრანზისტორს ვათავსებთ ორ წყაროს შორის, რის შედეგადაც ძაბვის სხვაობა დრენაჟსა და წყაროს შორის შეიძლება იყოს მნიშვნელოვანი, რაც გამოიწვევს სითბოს გამომუშავების გაზრდას და ტრანზისტორი ძალიან გაცხელდება. ასევე, ტრანზისტორის გასახსნელად ან დახურვისთვის დაგჭირდებათ საკონტროლო წრე (დრაივერი), რადგან მიკროკონტროლერის დაფიდან საკონტროლო ძაბვის დონეა 5 ვ, რაც არ არის საკმარისი ტრანზისტორის გასაკონტროლებლად კარიბჭედან ძაბვის სხვაობის შესაქმნელად. (ტრანზისტორის გასაკონტროლებლად, მაგალითად, IRFZ44N, მის კარიბჭეს უნდა მივმართოთ 8-12 ვ, რათა გავხსნათ). ნებისმიერ შემთხვევაში - მზა სარელეო მოდული, რომელიც უბრალოდ უნდა იყოს დაკავშირებული და რომელიც დახურვის შემთხვევაში გარანტირებულია გამომავალი შესასვლელთან უპრობლემოდ დაკავშირება.
ამრიგად, ჩვენ მივიღეთ არა მხოლოდ გადართვის დაფა, არამედ სრულფასოვანი დენის დაფა. დაფა შეიცავს DC/DC კონვერტორებს, რეზისტენტულ სქემებს, დაუკრავენ და კონექტორებს ელექტრონიკის დასაკავშირებლად. სტრუქტურულად, ორი კონექტორი შეიძლება გამოირჩეოდეს. კონექტორი CON1, რომელსაც უკავშირდება ბატარეის ნაკრები, დენის გადამრთველი/ღილაკი, დენის კონექტორი, სარელეო მოდული, ძრავები, ძრავის დრაივერის დაფა - პლატფორმის შიგნით არსებული ყველა პერიფერიული მოწყობილობა. და კონექტორი CON2, რომლის დანიშნულებაა საკონტროლო დაფაზე დაკავშირება. ტელემეტრიული და საკონტროლო სიგნალები, 5 ვ ძაბვა, გამოდის ამ კონექტორზე, ასევე სასარგებლოა ძაბვის "გადატუმბვა" Vbat ბატარეის პაკეტიდან - ჩვენ ვაძლევთ შესაძლებლობას "უფრო მაღალ დონეზე" მოაწყონ საკუთარი დენის არხები სხვადასხვა გზით. ძაბვები, მაგალითად, 6 ვ სერვოების კვებისათვის.
შასის ელექტრონიკა
ელექტრონიკა შეირჩა მოწყობილობის ელექტრული წრედის განვითარების პარალელურად.
დენის სოკეტი და გადამრთველი გამოყენებული იქნა მიღებული შასის ნაკრებიდან. შეირჩა და შეიძინა დრაივერი ძრავებისთვის, რომელიც დაფუძნებულია L298N ჩიპზე, XL4005 DC/DC გადამყვანის დაფები, უსახელო სარელეო მოდული, ბატარეის განყოფილება და მიკროსქემის დაფა, რომლის ზომებია 50x70 მმ და ხვრელის მოედანი 2,54 მმ.
გარდა ამისა, დაგვჭირდება შემდეგი მასალებიც.

ფოტოს ზედა ნაწილში შეგიძლიათ იხილოთ რამდენიმე გრძელი ქინძისთავი 2.54 მმ სიგრძით, ასევე სოკეტები, ქვემოთ არის ლითონის კონტაქტები კაბელისთვის, მარცხნივ არის სოკეტები მათთვის, მარჯვნივ არის ხრახნები, თხილი და M2. საყელურები. დაფის და კაბელის კონექტორებს სხვადასხვა მაღაზიაში სხვანაირად უწოდებენ. ისტორიული მიზეზების გამო, მე ვეძახი პინ კონექტორებს დაფისთვის PLS, სოკეტებს დაფის PBS და კონექტორებს კაბელის BLS. ინტერნეტში, უცხოურ საიტებზე, ასეთ კონექტორებს ეძებენ "2.54 მმ კონექტორის" ან "დუპონტის კონექტორის" გამოყენებით. გარდა ამისა, დაგჭირდებათ სხვადასხვა სახარჯო მასალები - გამაგრილებელი, ფლუქსი, მავთულები და ა.შ., ასევე ხელის ხელსაწყოების ნაკრები - მავთულის საჭრელი, პინცეტი, ხრახნიანი და ა.შ. - ეს ყველაფერი ჩვეულებრივ ხელმისაწვდომია მათთვის, ვინც მაინც აკეთებს რაღაცას წვრილმანი (Do It Yourself - გააკეთე ეს თავად).
ელექტრონიკის და კორპუსის შეკვეთამდე მივხვდი, რომ შერჩეული ელექტრონიკა უპრობლემოდ უნდა მოთავსდეს შიდა სივრცეში. ამის შემოწმების დრო დადგა: ვაწყობთ ელექტრონიკას და აღვნიშნავთ მომავალ ლოკაციებს.


ახლა დავიწყოთ დაფების მომზადება.
დავიწყე ბატარეის პაკეტით. ლითიუმ-იონური ბატარეის კონტროლერი "დამონტაჟდა" ცხელ დნობის წებოვანზე და მასზე დამაგრებული იყო საკონტაქტო ქინძისთავები მიკროსქემის მიხედვით. ვფიქრობ, მკითხველს დააინტერესებს რა გაკეთდა და რა ინსტრუმენტით, ამიტომ სტატიის ბოლოს, სპოილერის ქვეშ, ჩემი მოკლე კომენტარებით გამოვაქვეყნე გამოყენებული ზოგიერთი აღჭურვილობის სურათები. ცხელი დნობის წებოვანი გამოიყენება ცხელი დნობის იარაღის გამოყენებით. თუმცა, მანამდე მომიწია სამუშაოების გაკეთება, რათა, ასე ვთქვათ, ამ კუპეს საიმედოობა გამეუმჯობესებინა. ყველას გავაფრთხილებ, ვინც რაღაცის გაკეთებას გეგმავს - ჯობია არ დაუშვას ჩემი შეცდომა და აიღოთ უფრო გამძლე ბატარეის განყოფილებები. ოდესღაც საცალო ვაჭრობაში ასეთ კუპეებს ვერ ვპოულობდი და როცა ვიპოვე, სიხარულისა და გულის სიმარტივის გამო ბევრი შევაგროვე. მაგრამ მათთან ყველაფერი არც ისე მარტივია. იმის გამო, რომ ამ განყოფილებაში ბატარეები ბრტყელი, გამოუცდელი დადებითი ბალიშებით უბრალოდ არ აღწევს კონტაქტს. გარდა ამისა, ყველა ზამბარით დატვირთული კონტაქტი ბრუნავს, კონტაქტი ცუდია. ამიტომ, მე მომიწია M2 ჭანჭიკების ხრახნი, ჭარბი კბენა, თხილის დამაგრება და კონტაქტის გასაუმჯობესებლად. მაგრამ ეს საკმარისი არ მომეჩვენა და მე ასევე საფუძვლიანად გავაერთიანე ყველა კავშირი. რადგან თუ რამე კეთდება, მაშინ უნდა იყოს სანდო, რომ მომავალში პრობლემები არ შეუქმნას და ისევ არ დაუბრუნდეს.
უნდა აღინიშნოს, რომ ლითიუმ-იონური ბატარეებისთვის გამოიყენება ჩვეულებრივი კონტროლერი დაბალანსების გარეშე. ეს ნიშნავს, რომ როდესაც სამი ბატარეიდან ერთ-ერთი დამუხტულია, კონტროლერი სავარაუდოდ შეწყვეტს ყველა ბატარეის დატენვას. სინამდვილეში, ეს არის უბრალოდ დამცავი დაფა ბატარეების დაბალი გამონადენისა და გადატვირთვისა და გამონადენის კონტროლისგან. ამიტომ მიზანშეწონილია გამოიყენოთ ბატარეები იგივე რეალური ტევადობით. თუ თქვენ იყენებთ კონტროლერს დაბალანსებით, მაშინ სიმძლავრის შერჩევა ნაკლებად კრიტიკულია და ბატარეები უფრო ეფექტურად გამოიყენებენ, მაგრამ ასეთი კონტროლერები უფრო ძვირია და მეტ ადგილს იკავებს. როგორ ავირჩიოთ ბატარეები იგივე რეალური ტევადობით? ყოველივე ამის შემდეგ, იგივე სერიების იდენტური ბატარეების შეძენისას, თუნდაც ბრენდებისგან, სიმძლავრე შეიძლება განსხვავდებოდეს 5-10% -ით, ხოლო ჩინური ბატარეები, რომლებიც ეტიკეტირებულია 6000-8000 mAh, ზოგადად, უცნობი ტევადობის ბატარეებია. რეალური სიმძლავრეების გასაზომად გამოვიყენე OPUS BT-C3100 დამტენი, რომელიც საკმაოდ პოპულარულია ჩემს გარემოში. მისი დახმარებით შემოწმდა 12 შეძენილი ელემენტი და შეირჩა სამი, რომელთა სიმძლავრის დიაპაზონი მინიმალური იყო და რამდენიმე პროცენტს არ აღემატებოდა. LG LGABC21865 ბატარეების სიმძლავრე იყო 2800 mAh, მაგრამ სინამდვილეში ის მერყეობდა 2400-2500 mAh დიაპაზონში (შემოწმებულია 700 mA დენზე).
მოკლე გადახვევა რეფლექსიის სახით. დამტენმა გამოგვთვალა ბატარეის სიმძლავრე, მათი დატენვის 4,2 ვ-მდე და გამონადენის გათვალისწინებით, თუ არ ვცდები OPUS BT-C3100-ზე, 2,8 ვტამდე. 3, 7 V. ანუ, ჩვენი სამუშაო ბატარეის სიმძლავრე გაცილებით დაბალია ვიდრე გაზომილი. ეს გასათვალისწინებელია. შესაძლოა, მომავალში, ღირს ოთხი ბატარეის ბატარეის პაკეტის გათვალისწინება. შესაძლებელია თუ არა ბატარეის და კვების წყაროს უბრალოდ გამოცვლა მის დასატენად? მოდით გავარკვიოთ. ჩვენ მივიღებთ ძაბვის დიაპაზონს 14,4-16,8 ვ. ძაბვის გადამყვანები მუშაობენ შემავალი ძაბვებით 32 ვ-მდე. რეზისტენტული გამყოფები მოგვცემენ ტელემეტრიის სიგნალების ძაბვის დიაპაზონს 4,3-5,1 ვ, რაც ოდნავ აღემატება 0- ზედა დიაპაზონს. 5 Q. მაგრამ ამის წინააღმდეგობა შესაძლებელია საკონტროლო დაფის დონეზე - თუ ტელემეტრიის ძაბვა არის 5 ვ, მაშინ ბატარეის პაკეტი ცოტა ხნის შემდეგ თითქმის დაიტენება. მეორეს მხრივ, თუ ძრავებზე ძაბვას 6-7 ვ-მდე დაუწევთ, შეგიძლიათ უფრო ძლიერად დაცალოთ არსებული ბატარეის ნაკრები და გამოიყენოთ ბატარეები უფრო ეფექტურად - ამ შემთხვევაში მხოლოდ ერთი ძაბვის გადამყვანის რეგულირება დაგჭირდებათ. ერთი შეხედვით, არსებობს შესაძლებლობა სამომავლო კვლევისთვის, ტექნიკის შესაცვლელად, და როგორ უნდა განხორციელდეს ტელემეტრიული სიგნალების ინტერპრეტაცია დაყენებული ბატარეის პაკეტიდან გამომდინარე - დაე, ეს გადაწყდეს საკონტროლო დაფის დონეზე, ანუ ახლა თქვენ არ იცით. არ უნდა იფიქრო ამაზე.
გამომავალი მავთულები გამომავალი ბატარეის შეკვრიდან სპეციალური ქლიბით (სტრიპტიერი) მოვაშორე და ჩავჭყლიტე ლითონის კონტაქტებში ჩამჭიდრო კლიპების (კრიმპერული) გამოყენებით, საიმედოობისთვის შევადუღე და დავდე პლასტმასის კორპუსები, მივიღე BLS კონექტორები. შედუღებისას გამოიყენებოდა შედუღების სადგური, POS-61 როზინის გარეშე, ხოლო ნაკადად გამოიყენებოდა უწმინდური FluxPlus NC-D500.



აკუმულატორის აწყობის და მასში ბატარეების დაყენების შემდეგ ის არაფერს გამოსცემს. ასეა შექმნილი ლითიუმ-იონური ბატარეის კონტროლერი - ისინი ამცირებენ დატვირთვას, როდესაც არის მოკლე ჩართვა, ძლიერი გამონადენი ან ჭარბი გამონადენი. დაცვის "გადატვირთვის" და აკუმულატორის მუშა მდგომარეობაში მოსაყვანად, საჭიროა +P/-P კონტაქტებზე 12-12.6 ვ. იგივე უნდა გაკეთდეს ბატარეების კონტროლერთან პირველად შეერთების შემდეგ. ამის შემდეგ, თქვენ შეგიძლიათ შეამოწმოთ, რომ ერთეული აწარმოებს ძაბვას, თუ ბატარეები სწორად არის დაკავშირებული კონტროლერთან.
ასეთი ბატარეების დატენვისთვის არის კვების წყაროები გამომავალი ძაბვით 12,6 ვ (3x4,2 ვ). ასეთი ელექტრომომარაგებით ბატარეები უფრო ეფექტურად გამოიყენებენ, თუმცა 12 ვოლტიანი დენის წყაროების გამოყენება უკვე მაქვს 12,6 ვოლტის სიმძლავრით და 5 ა დენით. თუ მსგავსი წყაროა. შეძენილი, მაშინ ღირს შემოწმება, შეესაბამება თუ არა მას დეკლარირებულ მახასიათებლებს. უმარტივესი ტესტია დატვირთვის სიმძლავრის შემოწმება. ამისთვის გამოვიყენე კერამიკული რეზისტორები ნომინალური მნიშვნელობით 1 Ohm 10 W და 4.7 Ohm 10 W. ასეთი რეზისტორებისგან 2,5 Ohms წინააღმდეგობის მქონე ასამბლეის აწყობის შემდეგ, მე დავუკავშირე მას ელექტრომომარაგება და გავზომე ძაბვა მის გამოსავალზე. 12,6/2,5 = 5 ა გამოთვლილი დენით, ჩემი კვების წყარო გამოვიდა 12,6 ვ - ეს შესანიშნავი შედეგია. ჩინური ელექტრომომარაგებები, რომლებიც ამბობენ რაღაც 12V3A-ს მსგავსს, ხშირად იწყებენ 10-20%-ით „ჩამოქცევას“ მხოლოდ დაახლოებით 1 ა დატვირთვით.


ანალოგიით, მომზადდა ჩამრთველი და დენის სოკეტი.

თმის საშრობის გამოყენებით, ტერმინალური ბლოკი ამოიღეს სარელეო მოდულიდან და PLS კონტაქტები შედუღეს. ამ მოდულის დენის დაფასთან დასაკავშირებლად გავაკეთე მავთულები - 18-20 AWG კვეთის დენის მავთულები (რომლებითაც შეერთდება დენის კონექტორი და ბატარეის ნაკრები) გავშიშვლდი, დავაკრიფე და შევადუღე. და კონტროლისთვის გამოვიყენე მავთულები, რაც მქონდა, უფრო თხელი ბირთვით, რომლის მოძებნაც მარტივად შეიძლება სახელწოდებით "დუპონი".

იგივე გაკეთდა ძრავის მძღოლთან.


"ფეხები" იყო შედუღებული DC/DC კონვერტორებზე. აღსანიშნავია, რომ ეს კონტაქტები დამზადებულია ლითონისგან, რომლის კარგად შედუღება შესაძლებელია მხოლოდ აქტიური ნაკადით. შემდეგ, FluxPlus-ის ნაცვლად, ვიყენებ LTI-120-ს, რასაც მოჰყვება შედუღების ადგილები იზოპროპანოლით დასველებული ქსოვილით გაწმენდით ნაკადის ნარჩენების მოსაშორებლად.

ახლა ჩვენ ვაკეთებთ ჩვენს დაფას ელექტრონიკით. დასაწყისისთვის, კარგი იდეაა წარმოიდგინოთ ზოგადად როგორ და რა იქნება დაკავშირებული დაფაზე. ანუ შეეცადეთ დახაზოთ მიკროსქემის დაფა.
[ელექტრო დაფა]

გამოიცანით, საიდან მოვედი და "გავაწურე" ეს დაფა? ჩვენ ვხედავთ ორ კონექტორს დაფაზე, ორ ძაბვის გადამყვანს. გაჩნდა დამატებითი ჯუმპერი (მოხსნადი ჯუმპერი), რომლის დამონტაჟება შესაძლებელია ელექტრული წრედან დაუკრავენ გამორიცხვით - მე ეს გავაკეთე სპეციალურად დაფის დამზადების დროს დაუკრავენის ბანალური არარსებობის გამო.
დაფის გაყვანილობა საკმაოდ დამღლელი და შრომატევადი სამუშაოა. კვებისათვის გამოვიყენე მავთულები 18-20 AWG კვეთით, სხვა სიგნალებისთვის - 26-30 AWG. რატომ ზუსტად breadboard და hassle ერთად გაყვანილობა? რადგან ჩვენ ჯერ კიდევ გვაქვს მხოლოდ პირველი პროტოტიპი. რაღაც შეიძლება შეიცვალოს, ამიტომ გაყვანილობის ხელახლა შედუღება უფრო ადვილია, ვიდრე ტრასების მოჭრა და ყველა სახის ჯემპერის შედუღება მზა ბეჭდურ მიკროსქემის დაფაზე. ბეჭდური მიკროსქემის დაფის დამზადებას დრო სჭირდება - განლაგება, ნიღბის დამზადება, ოხრახუში, გაბურღვა, დაკონსერვება, გათიშვა - ნაკლებად სავარაუდოა, რომ ამას ნაკლები დრო დასჭირდეს, ვიდრე "გაყვანილობის" დაფის დამზადებას. მიუხედავად იმისა, რომ ბეჭდური მიკროსქემის დაფა უფრო საიმედო და პროფესიონალურად გამოიყურება.
იგივე მიზეზების გამო, DC/DC კონვერტორის მოდულები არ არის შედუღებული დაფაზე, მაგრამ მზადდება მოსახსნელი მოდულების სახით, იდეალურად, თავდაპირველი გამართვის შემდეგ, ისინი დამატებით უნდა იყოს დამაგრებული კონექტორზე, მაგალითად, ცხელი წებოს ჩამოშვებით. კარგი იდეაა იგივე მეთოდის გამოყენება ყველა კონექტორის კავშირის საიმედოობის გასაზრდელად. მაგრამ სანამ გვაქვს პროტოტიპი, ჩვენთვის უფრო მოსახერხებელია ყველაფერი მოსახსნელი გავხადოთ, რათა მომავალი გამართვისას გვქონდეს უფასო წვდომა ნებისმიერ მნიშვნელოვან კომპონენტზე და საჭიროების შემთხვევაში გავუადვილოთ მისი ჩანაცვლება.




დაფის დამზადების შემდეგ აუცილებელია შემოწმდეს რა არის მიღებული მიკროსქემისა და გაყვანილობის დიაგრამებთან შესაბამისობისთვის. მულტიმეტრის გამოყენებით, მე ვამოწმებ შეყვანებსა და გამომავალს მოკლე ჩართვაზე (უმჯობესია არა კონტაქტების "დარეკვა", არამედ მათი წინააღმდეგობის გაზომვა, რადგან არასწორი წარმოების ან დიზაინის შემთხვევაში, მაგალითად, ასი ომის წინააღმდეგობა შეიძლება ჩამოყალიბდეს შესასვლელში, რომელიც შეიძლება არ "ზარს" ", მაგრამ მისი არსებობა იქნება შეცდომა წრეში და შეიძლება გამოიწვიოს დიდი უბედურება), და ასევე დარწმუნებული ვარ, რომ ყველაფერი დაკავშირებულია დაფის შიგნით, როგორც საჭიროა.
შეკრებამდე შემოწმების შემდეგ, დარწმუნდით, რომ დაფა ნორმალურად იმუშავებს, როდესაც ყველა პერიფერიული მოწყობილობა დაკავშირებულია. ამისათვის ჯერ უნდა დააკავშიროთ ბატარეის ნაკრები, დენის ჩამრთველი და გადაატრიალოთ ჩამრთველი. ძაბვის გადამყვანებზე LED-ები უნდა აანთონ და არაფერი არ დაიწვას. მიუხედავად იმისა, რომ არაფერია დაკავშირებული, აუცილებელია კონვერტორების გამომავალი ძაბვის რეგულირება. შემდეგ ელექტროენერგია გამორთულია, სარელეო მოდული ჩართულია და დენი კვლავ გამოიყენება. ამ გზით, ყველა პერიფერიული მოწყობილობა დაკავშირებულია ეტაპობრივად და კონტროლის ქვეშ.
პლატფორმის ელექტრონიკის მონტაჟი და შეერთება
ელექტრონიკა მზადაა. ახლა თქვენ უნდა დააინსტალიროთ იგი. გახსოვთ, ელექტრონული დაფების ადგილები იყო მონიშნული? უსადენო ხრახნიანი გამოყენებით, ხვრელები გაბურღულია საჭირო ადგილებში. შემდეგ მათ ქვიშავენ მინი ბურღის გამოყენებით ქვიშის დანართით. M2 ხრახნები იკვრება ხვრელებში. საყელურები უნდა განთავსდეს ხრახნებისა და თხილის ქვეშ. გარდა ამისა, მეორე თხილზე დავკეცე - საკეტის თხილი უზრუნველყოფს უფრო საიმედო ხრახნიან კავშირს და შეამცირებს მისი ამოხსნის ალბათობას. ჩვენ ვამზადებთ მანქანას.
მე აღვნიშნავ, რომ მანძილი ორ მიმდებარე ძრავას შორის საკმაოდ დიდია. ეს მნიშვნელოვანი პუნქტია გასათვალისწინებელი შემდეგი მიზეზის გამო. ფაქტია, რომ შერჩეული ძრავები უკუკავშირის გარეშეა. ჩვენ უბრალოდ ვიყენებთ მათზე ძაბვის გარკვეულ დონეს და ისინი ტრიალებს გარკვეული სიჩქარით. მაგრამ ძრავების მახასიათებლები შეიძლება განსხვავდებოდეს, რაც ნამდვილად გამოიწვევს პრობლემებს სწორი ხაზით მართვის დროს. თუ ძრავების გავრცელება მცირეა და რობოტს მხოლოდ ოპერატორი გააკონტროლებს, რომელსაც ყოველთვის შეუძლია მოძრაობის გამოსწორება, მაშინ ეს შეიძლება არ იყოს მნიშვნელოვანი პრობლემა. მაგრამ თუ გავრცელება მნიშვნელოვანია ან რობოტს მოუწევს დიდი მანძილის გავლა „სწორ ხაზზე“ ავტომატურ რეჟიმში, მაშინ აუცილებელია უკუკავშირის მიწოდება. არსებობს დიზაინით იდენტური GM25-370 ძრავების სერია, რომლებზეც უკვე დამონტაჟებულია ჰოლის სენსორები. რა არის ეს? ძრავის უკანა მხარეს, წაგრძელებულ ლილვზე დამაგრებულია დისკი მასზე განთავსებული მაგნიტით, რომელიც გავლენას მოახდენს ჰოლის სენსორზე. დისკის ყოველი სრული ბრუნვის შემდეგ ვიღებთ იმპულსურ სიგნალს, რომლის დამუშავებით შეგვიძლია დავაყენოთ რევოლუციების რაოდენობა წუთში. ამრიგად, ჩვენი პლატფორმა შეიცავს საკმაოდ სერიოზულ საფუძველს მომავლისთვის: შესაძლებელია ძრავების დაყენება უკუკავშირით, მათი დაკავშირება დენის დაფაზე, რომელიც ამუშავებს მათ სენსორებს და გადასცემს ტელემეტრიის სიგნალებს საკონტროლო დაფაზე - კონტროლის სისტემას შეუძლია ავტომატურად ძრავების სიჩქარის გათანაბრება.


მავთულები ძრავებზე გავამაგრე მათზე არსებული ნიშნების შესაბამისად - თითოეულ ძრავზე იყო წითელი წერტილი ორი კონტაქტიდან ერთ-ერთთან. ძრავების მიღების შემდეგ შევამოწმე, მაგრამ ამ მარკირების სისწორეს ყურადღება არ მიმიქცევია. სხვათა შორის, ერთ-ერთი ძრავა დეფექტური იყო და საერთოდ არ დატრიალდა, გამყიდველმა გამომიგზავნა შემცვლელი, რომელსაც მინიმუმ ერთი თვე დასჭირდა. შემდგომში გაირკვა, რომ ერთ-ერთი ძრავის მარკირება აირია, მაგრამ ეს არ არის პრობლემა - უბრალოდ შეცვალეთ ამ ძრავის დენის დაფასთან დაკავშირების პოლარობა. წინ რომ ვუყურებ, ვიტყვი, რომ იგივე სიტუაცია მოხდა „მხარეების“ კავშირთან დაკავშირებით - როდესაც გაცემული იყო ბრძანება „წინ“, მარჯვენა მხარეს ბორბლები ბრუნავდა წინ, ხოლო მარცხენა მხარეს, უკან. ეს ასევე შეიძლება გამოსწორდეს ძრავის სასურველი დრაივერის არხის დენის დაფასთან შეერთების პოლარობის შეცვლით. კავშირის პოლარობის შეცვლა - არ არის საჭირო რაიმეს შედუღება ან ხელახლა გაკეთება, თქვენ უბრალოდ უნდა შეცვალოთ მავთულები.
ელექტრონიკის დაფებსა და კორპუსს შორის ელექტრული კონტაქტის აღმოსაფხვრელად, მე დავჭრა პლასტმასის ფირფიტები ბლისტერიდან პლატფორმის ძირზე.

დააინსტალირეთ ბატარეის პაკეტი. პლასტმასი ძალიან რბილია და ფაქტიურად იშლება ხრახნიანი თავის ქვეშ, სარეცხი საშუალებაც კი არ მეხმარება, ამიტომ მე მომიწია გრძელი ლითონის ფირფიტის გამოყენება.


ყველა ჩვენმა ჭანჭიკმა და თხილმა ქვედა მხარეს ოდნავ შეამცირა მიწის კლირენსი და გამოიყურება საკმაოდ ესთეტიურად სასიამოვნო.


ჩვენ ვამაგრებთ ქვედა ნაწილს, სადაც დამონტაჟებულია ელექტრონული დაფები. ჩვენ ასევე ამოვჭრით და ვათავსებთ პლასტმასის ზოლს ლითონის ფილაზე ბატარეის შეფუთვაში, რათა ბატარეის კორპუსიც კი არ დაკაწროს ხრახნის თავზე, ლითიუმი სერიოზულია!


ვამონტაჟებთ და ვამაგრებთ ელექტრონულ დაფებს და დენის კონექტორს.






კოშმარია, რამდენი მავთული... პერიფერიულებს ვაკავშირებთ დენის დაფას.


პლატფორმის კონტროლის ელექტრონიკა
როგორც გესმით, პრინციპში, დავალება დასრულებულია. პლატფორმა მიიღეს, ყველაფერი საკმაოდ წარმატებით ჩაიარა. პლატფორმის გასაკონტროლებლად შეგიძლიათ გამოიყენოთ ნებისმიერი მიკროკონტროლერი, FPGA, Arduino დაფები, Intel Galileo და ა.შ.მე ავირჩიე Arduino Nano დაფა, ვიპოვე იაფი და მოსახერხებელი გაფართოების დაფა პერიფერიული მოწყობილობების დასაკავშირებლად და მისთვის ბლუთუზი მოდული. ძირითადი იდეა არის ჩვენი პლატფორმის კონტროლი სმარტფონიდან bluetooth-ის საშუალებით. გაფართოების დაფა, გარე მოწყობილობების დასაკავშირებლად კონტაქტების სიმრავლით, საშუალებას მოგცემთ შეუფერხებლად დააკავშიროთ მომავალი რობოტის პერიფერიული მოწყობილობები მომავალში.


ახლა ჩვენ უნდა დავაპროექტოთ და გავაკეთოთ მიკროსქემის დაფა ამ ელექტრონიკისთვის. ჩვენ გავაკეთებთ "სენდვიჩს": მიკროსქემის დაფას, რომელზედაც დამონტაჟებულია ბლუთუსის მოდული და გაფართოების დაფა, რომელშიც, თავის მხრივ, დამონტაჟებულია დაფა მიკროკონტროლერით.

დენის დაფასთან შედარებით, ეს დაფა არის თითქმის წმინდა გადამრთველი დაფა. ცენტრში, კაბელი უკავშირდება 18-პინიანი სამ რიგის კონექტორს, რომელიც აკავშირებს ამ საკონტროლო დაფას დენის დაფასთან. ამ კონექტორიდან სიგნალები გადადის გაფართოების დაფის საჭირო კონტაქტებზე, რომლებიც შემდეგ გადადიან მიკროკონტროლერის საჭირო, წინასწარ შერჩეულ კონტაქტებზე. ასევე, 5 V და Vbat გამოდის დაფაზე კონტაქტების განცალკევებისთვის. დაფას მიეწოდება ბლუთუთის მოდული, მისი Rx/Tx შეყვანები დაკავშირებულია Arduino Nano დაფის Rx/Tx შეყვანებთან გაფართოების დაფის საშუალებით. დაფა შეიცავს მოსახსნელ ბიპოლარულ LED-ს, რომლის დანიშნულებაა ელექტროენერგიასთან დაკავშირებული ყველა პროცესის მითითება. LED-ს შეუძლია შექმნას მწვანე და წითელი მუდმივი ბზინვარება, ციმციმებს მოცემულ სიხშირეზე - ეს საკმარისი უნდა იყოს ბატარეის პაკეტის ნორმალური ძაბვის, მისი გამონადენის მითითებისთვის, დატენვის პროცესის მითითებით და დაკავშირებული ენერგიის წყაროს სიჯანსაღეზე.
იმისათვის, რომ არ დავბნეულიყავი, სად უნდა იყოს დაკავშირებული, სქემატურად დავხატე Arduino Nano დაფა და გავანაწილე სიგნალები.

Rx/Tx პორტებს იკავებს bluetooth მოდული, რომელიც მუშაობს UART პროტოკოლის გამოყენებით. თუ შესაძლებელია, IN1-IN4 სიგნალები დაკავშირებულია ციფრულ პორტებთან - ამ სიგნალების პოლარობა განსაზღვრავს ძრავების ბრუნვის მიმართულებას, ხოლო ENA/ENB იმ პორტებთან, რომლებიც საშუალებას აძლევს PWM სიგნალების გამომავალს - ეს სიგნალები განსაზღვრავს ბრუნვის სიჩქარეს. ძრავების. პლატფორმის ტელემეტრიის სიგნალის მნიშვნელობები ციფრული იქნება Arduino Nano დაფის ანალოგური შეყვანებით A0-A3. LED იკავებს A4 და A5 პორტებს და ის დაკავშირებულია ჯუმპერების საშუალებით. ფაქტია, რომ ეს ორი პორტი საჭიროა I2C პროტოკოლის მარტივი ორგანიზებისთვის და თუ დაგვჭირდება, შეგვიძლია უბრალოდ ამოიღოთ ჯუმპერები. LED შეიძლება "გადააგდეს" სხვა თავისუფალ პორტებში ან დაუკავშირდეს თავისუფალ პორტებს A4 და A5 პორტის გაფართოების მოდულით (მაგალითად, PCF8574T ჩიპზე დაფუძნებული - ის უზრუნველყოფს დამატებით რვა ციფრულ შემავალ/გამომავალ პორტს, მოდული არის კონტროლდება I2C პროტოკოლით) რომლის წყვილის ქინძისთავები და აკავშირებს LED-ს. კავშირების ამ განაწილების შედეგად, შენარჩუნებულია SPI მოწყობილობების უპრობლემოდ დაკავშირების, კიდევ ორი ანალოგური სიგნალის გაციფრული და ოთხამდე PWM სიგნალის გაცემის შესაძლებლობა (მაგალითად, სერვოების კონტროლისთვის). ზოგადად, მე მინდა მეტი უფასო სიგნალი, მაგრამ მათი რიცხვი შეიძლება გაიზარდოს PCF8574T-ის გამოყენებით. საბოლოო ჯამში, თქვენ შეგიძლიათ გამოიყენოთ სხვა Arduino Nano ან შეცვალოთ იგი საჭირო ამოცანების უფრო შესაფერისი პლატფორმით - ეს გამოსავალი სრულად უზრუნველყოფს გარკვეულ მინიმუმს.
ჩვენი დაფა ასევე უზრუნველყოფს ელექტროენერგიის მარტივ კავშირს: არის კონტაქტები 5 ვ სიმძლავრისა და ბატარეის ძაბვისთვის (12,6 ვ-მდე).
აღსანიშნავია Arduino Nano-სთვის გამოყენებული გაფართოების დაფის ერთი ნიუანსი. პრინციპში, გაფართოების დაფა გაძლევთ საშუალებას გაუშვათ Vbat მასზე. გაფართოების დაფაზე დამონტაჟებულია ძაბვის გადამყვანი, რომელიც ამცირებს შეყვანის ძაბვას 5 ვ-მდე და აწვდის მას Arduino Nano დაფას, რომლის გადამყვანი ამცირებს მას 3,3 V-მდე და ეს ძაბვა იხსნება Arduino Nano დაფაზე და ნაწილდება გაფართოების დაფის შესაბამისი კონტაქტები. თუმცა, მე ეს არ გამიკეთებია და 5 ვ დავუკავშირე გაფართოების დაფის შესაბამის კონტაქტს. გარდა ამისა, გაფართოების დაფაზე საკონტროლო LED საერთოდ არ ანათებდა, თუ Arduino Nano დაფა არ იყო დაყენებული, ანუ ეს გაფართოების დაფა Arduino Nano-ს გარეშე, როგორც ჩანს, რეალურად არ მუშაობს. მე არ განვიხილავ მიზეზებს, მაგრამ მე აღვნიშნე ეს წერტილი.
ჩვენ ვამზადებთ ამ საკონტროლო დაფას.



მასზე ვამონტაჟებთ ელექტრონულ დაფებს.



ჩვენ ვამზადებთ ადგილებს ჩვენი საბჭოსთვის. ამავდროულად ვამონტაჟებთ გადამრთველს.


და ჩვენ ვაგროვებთ ყველაფერს.


ახლა თქვენ უნდა გააკეთოთ კაბელი ორი დაფის დასაკავშირებლად. ჩვენ ასევე ვამაგრებთ დენის კონექტორებს საიმედოობისთვის. ჩვენ ვამოწმებთ ყველაფერს სწორად და ძალიან ფრთხილად. 12 ვ უნდა მოვიდეს 12 ვ-მდე, ხოლო 5 ვ უნდა მივიდეს 5 ვ-მდე. დენის და საკონტროლო მიკროსქემის დაფების სურათებზე ნაჩვენებია „ზედა ხედი“, ანუ, თუ დაფებს გადააბრუნებთ, შემდეგ ქვედა, შედუღების მხარეს. დაფები, კონტაქტები იცვლება - ეს აუცილებელია გავითვალისწინოთ კაბელის დამზადებისას და მასში შესაბამისი მავთულის გავლისას. კონექტორები უბრალოდ გავაკეთე: ჯერ BLS კონექტორებით ავაწყვე მავთულის სერია და ორჯერ შემოვახვიე ლენტით. შემდეგ ორი/სამი მწკრივი შეკრიბა და ისევ მჭიდროდ შემოახვია ლენტით. შედეგი იყო სრული და მონოლითური კონექტორი. პლასტიკური BLS კონექტორები კონტაქტების გარეშე უბრალოდ მოთავსდა გამოუყენებელ კონექტორებში.
კაბელის დამზადების შემდეგ, ყველა ელექტრონული დაფა ამოღებულია საკონტროლო დაფიდან და მოწმდება მულტიმეტრის გამოყენებით ისევე, როგორც დენის დაფა. ჩვენ ვაკავშირებთ საკონტროლო დაფას დენის დაფას და ვაძლევთ ენერგიას. მულტიმეტრის გამოყენებით, ჩვენ ყურადღებით ვამოწმებთ ყველა მოდულის დენის კონტაქტებს, ვიკითხავთ ტელემეტრიის სიგნალების ძაბვებს - კიდევ ერთხელ დავრწმუნდებით, რომ ყველაფერი სწორად არის გაყვანილი. თქვენ არ გჭირდებათ ამის გაკეთება, თავდაჯერებულად ააწყვეთ ყველაფერი, მიმართეთ ელექტროენერგიას და აღმოაჩენთ, რომ რაღაც, რა თქმა უნდა, მისტიური გზით, 5 V და Vbat სადენები აირია და ჩვენი Arduino დაფა და ბლუთუზი მოდული დაიწვა. მაგრამ უმჯობესია არ გაიმეოროთ სხვა ადამიანების შეცდომები.
ფოტოზე ხედავთ, რომ ერთ-ერთი წითელი დენის მავთული ვერცხლისფერია. ეს არის დირიჟორის აღნიშვნა, რომელიც გადასცემს Vbat ძაბვას. მოწყობილობის აწყობისას სასარგებლოა დასაკავშირებლად „გასაღებების“ გაკეთება. მაგალითად, განზრახ არ გაამაგროთ ერთი PLS კონტაქტი კონექტორზე, მაგრამ გააფუჭეთ კაბელის შესაერთებელი ბუდე ან ჩაკეტეთ იგი საიზოლაციო ნაჭერით - ამ შემთხვევაში, ხორციელდება "სულელური დაცვა", რადგან ასეთი კაბელის დაყენება შესაძლებელია მხოლოდ. ზუსტად შესაბამის კონექტორზე დაფაზე უბრალოდ იმიტომ, რომ სხვაგვარად არ დაინსტალირდება (მეთოდი არ იძლევა 100%-იან გარანტიას - ინტერნეტი სავსეა სურათებით, სადაც განსაკუთრებით დაჟინებული პირები როგორღაც ახერხებენ ამგვარი დაცვის გვერდის ავლით, შესაშური გამძლეობისა და მათი შესანიშნავი სიძლიერის გამოყენებით ). მე ჩვეულებრივ ვღებავ შესაბამის ქინძისთავებს კონექტორებზე. სასარგებლო იქნება დენის დაფაზე DC/DC გადამყვანების შეყვანის კონექტორების მონიშვნა და დაფაზე შესაბამისი სოკეტების შეფერილობა. ეს ხელს შეუშლის კონვერტორების არასწორად დამონტაჟებას და თუ იყენებთ რამდენიმე ფერს, ეს ხელს შეუშლის 5 ვ და 9 ვ ძაბვის კონვერტორის დაფების შერევას, შეგიძლიათ გამოიყენოთ ფრჩხილის ნათელი ლაქი. ეს პატარა წესი მნიშვნელოვნად უწყობს ხელს მოწყობილობის ხშირ აწყობას/დაშლას, რომელიც ვითარდება მისი გამართვისა და ტესტირების ეტაპზე.



ჩვენ ვაკავშირებთ კაბელს დენის დაფას.
მოკლედ მინდა დავუბრუნდე სტატიის დასაწყისში, იმ მომენტს, როცა პლატფორმა ორ ნაწილად გავყავით და საკონტროლო დაფა „ცალ-ცალკე“ ამოვიღეთ. იმ დროს ეს ძალიან დაბალანსებული გადაწყვეტილება ჩანდა. თუმცა, თუ გადავხედავთ კონტაქტების უხვი ველს Arduino-ს გაფართოების დაფაზე, ჩვენ გვესმის, რომ ამ კონტაქტების კარგი ნახევარი არ შეიძლება გამოყენებულ იქნას პლატფორმის მიმდინარე დანერგვით - ჩვენ დავიკავეთ შემავალი/გამომავალი კონექტორების თითქმის ნახევარი Arduino დაფაზე. და თავად მიკროკონტროლერი "აწარმოებს" არა მხოლოდ პროგრამას ძრავებისთვის წყვილი PWM სიგნალების გასაცემად, არამედ უზრუნველყოფს სრულ კონტროლს მთელი პლატფორმის შიდა და გარე ელექტრომომარაგებაზე. ღირს დაფიქრება - იქნებ ღირდეს მიკროკონტროლერის ჩართვა ჩვენი პლატფორმის ძრავის განყოფილებაში? Bluetooth გადაეცემა "ზემო პლატფორმის" ელექტრონიკას, რომელიც გააკონტროლებს რობოტის მოწყობილობებს და გააზრებული იქნება მასთან კავშირის ინტერფეისი. თქვენ შეგიძლიათ მოაწყოთ UART პროტოკოლი (ის დაიკავებს მიკროკონტროლერის ორ პინს), რომლის მეშვეობითაც გადაიცემა მონაცემთა პაკეტი, რომელიც შეიცავს ძრავების ბრუნვის მიმართულებას და სიჩქარეს, ასევე პლატფორმის ზოგად მდგომარეობას... და თქვენ დიზაინზე კარგად უნდა ვიფიქროთ, რადგან ძრავის განყოფილებაში ბევრი ადგილი არ გვაქვს... თუმცა... თუ გაშალეთ და გადაიტანეთ რელე...
ჰოდა, ამით დასრულდა ჩემი გრძელი და ზოგჯერ მოსაწყენი ისტორია. მხოლოდ "ტექნიკა" - პლატფორმის აპარატურა - შეიქმნა, დამზადდა და აწყობილი. სამუშაოს შემდეგი ნაწილი არის პროგრამული უზრუნველყოფა. მაგრამ ეს არ ნიშნავს იმას, რომ მომავალში დაგჭირდებათ მხოლოდ პროგრამისტად მუშაობა. მიკროკონტროლერისთვის პროგრამული უზრუნველყოფის შექმნისა და მისი გამართვის პროცესში, ზოგჯერ თქვენ უნდა აიღოთ მულტიმეტრი, ან თუნდაც ოსცილოსკოპი და გაარკვიოთ, რა სიგნალი მოდის, სად და რა ფორმით. ჩვეულებრივ, სწორედ ამ ეტაპის დასაწყისში უფრო მეტად ჩნდება შეცდომები და უგულებელყოფა "ტექნიკის" დიზაინის ეტაპზე. ჩვენი მოწყობილობა ძალიან მარტივია, ასე რომ, თუ რამე არ მუშაობს, შეცდომა სწრაფად მოიძებნება. წარმოგიდგენიათ, როგორია მუშაობა მართლაც რთულ სქემებთან? აქ უფრო ფრთხილად და ფრთხილად უნდა იყოთ. ასევე საჭირო იქნება საკონტროლო ინტერფეისის ორგანიზება ბლუთუსის საშუალებით სმარტფონთან - რობოტსა და ტელეფონს შორის ინფორმაციის ურთიერთქმედების რაიმე სახის პროტოკოლის გამომუშავება. და განავითარეთ პროგრამული უზრუნველყოფა, რომელიც კომფორტულს და მოსახერხებელს ხდის რობოტის მართვას. მაგრამ ეს ყველაფერი სხვა, ცალკე ამბავია.
გამოყენებული ზოგიერთი ხელსაწყო და მოწყობილობა
BOSCH წებო კალამი.წებოს იარაღი. ბოშის ტერმინოლოგიაში ეს არის წებოს ჯოხი. შესანიშნავი მობილური გადაწყვეტა. ის მუშაობს 18650 ბატარეაზე, რაც იმას ნიშნავს, რომ მომავალში ჩანაცვლების პრობლემა არ იქნება და სხვა არაფერია რაც შეიძლება გაფუჭდეს. ის სწრაფად თბება (15 წამი) და გამორთვის შემდეგ მზადაა, თითქმის მაშინვე წყვეტს მუშაობას - მისგან წებო არ მოედინება, როგორც სხვა სითბოს იარაღში; ნაპოვნია აპლიკაცია ყოველდღიურ ცხოვრებაში და ხელნაკეთობებში. ერთადერთი უარყოფითი არის არც თუ ისე გავრცელებული წებოს ჩხირები: 7მმ, მაღალი ტემპერატურა 150...170C (შესაბამისია DREMEL GG01 და GG03 ჩხირები).

GROSS 17718.საიზოლაციო მოხსნის ხელსაწყო (სტრიპტიპერი). ცნობილი მოდელის KBT WS-04A-ს სრული ანალოგი, რომელიც ბევრმა მწარმოებელმა გაყიდა 1-ში.

HT-202A.ხელსაწყო მავთულის დაჭიმვისთვის დამაკავშირებელი კონტაქტებით (crimper).

სოლომონ SL-30.საიმედო შედუღების სადგური. შედუღების რკინის მიწოდების ძაბვა 24 ვ. ნიკელის მოოქროვილი წვერი. ზუსტი ტემპერატურის კონტროლი.

SAIKE 8858. Aka Element 8032. Aka Yihua 8858. Aka ZHaoxin 858DH. ამ მოდელებს შორის არის ვარიაციები, მაგრამ დიზაინი, გამათბობლები და ელექტრონიკა იგივეა. კარგი, მოსახერხებელი, იაფი და მართლაც კომპაქტური შედუღების იარაღი. ვიყიდე იმპორტის საიტზე, შემდგომი მოდიფიკაციებით იაფი ჩინური პროდუქტებისგან: ნებისმიერი ლითონის (!) ნამსხვრევების შერყევა, ნაკადის გამორეცხვა, დაფაზე კონტაქტების შედუღება, დენის ტრიაკი მოთავსებულია KPT8-ზე. ჯერჯერობით კმაყოფილი ვარ, ფენი ფენივით უბერავს, ტემპერატურა და აფეთქების სიჩქარე რეგულირდება. პრინციპში, ფენი ღირს ფული. ეს შედარებით უახლესი შესყიდვაა და სანდოობის სტატისტიკა ჯერ კიდევ გაურკვეველია, მაგრამ ეჭვი მაქვს, რომ ის შესაფერისი იქნება იშვიათი სამუშაოსთვის.

Metabo BZ 12SP.ძალიან ძველი ხრახნიანი. იშვიათობა. ესენი ალბათ აღარ იყიდება. საშუალებას გაძლევთ შეასრულოთ საკმაოდ დელიკატური სამუშაოები კარგი განლაგებისა და ღეროების ამოწურვის არარსებობის წყალობით.

Velleman VTHD02.მინი საბურღი. ან, როგორც მას ასევე უწოდებენ, დრემელი (თუმცა ეს ისეთივე არასწორია, როგორც ქსეროქსების ქსეროქსის გამოძახება). ოდესღაც კომპლექტი ვიყიდე აქციაზე, უფრო კმაყოფილი ვიყავი დანართების ნაკრებით, ვიდრე თავად საბურღი. თუმცა, ის საკმაოდ კარგი აღმოჩნდა დიეტის გარკვეული ცვლილებებით. ის მუშაობს ორიგინალური კვების წყაროდან, მაგრამ დატვირთვის პირობებში ეს გარკვეულწილად რთულია. დაახლოებით ორი წლის წინ, რა თქმა უნდა, მხოლოდ დროებით, მობილური ელექტრომომარაგება გაკეთდა კუპედან ოთხი 18650 ბატარეისთვის, რეგულირებადი გამომავალი სიმძლავრით. მინიდრილი ავტონომიური გახდა. ამ კვებით, მინი-ბურღმა გაცილებით უკეთ იგრძნო თავი და აღმოჩნდა ძალიან სასარგებლო მოწყობილობა ოჯახში.


Noble NB4000P-4.მულტიმეტრი. მოსახერხებელია, რადგან მავთულები შიგნიდან მთლიანად იხსნება. შეძენილია რთულ სტუდენტურ წლებში. ანუ დიდი ხნის წინ. მავთულები დიდი ხნის წინ გაწყდა - ჩვენ მოგვიწია "მუშაობა" სხვა წარუმატებელი მულტიმეტრიდან. ახლა მავთულის ამოღება შეწყდა. ბატარეა და დაუკრავენ რამდენჯერმე შეცვლილია. ის კვლავ მუშაობს - საოცარი საიმედოობა საშუალო სიზუსტით.

ფლუკი 179.მაღალი სიზუსტის მულტიმეტრი. მაღალი ხარისხის, მოსახერხებელი და, რაც მთავარია, ზუსტი ინსტრუმენტი.

მიიღეს როგორც ერთგვარი რეკლამა. თუმცა... რატომაც არა - სად არის მაშინ ჩემი საკომისიოები? ყველა ეს ინსტრუმენტი მოცემულია ზოგადი ინფორმაციისთვის. მაგალითად, ერთ დროს აღმოვაჩინე სტრიპტიზატორები, რომლებიც მავთულის მოხსნის პროცესს სამუშაოდან სიამოვნებად აქცევს და საერთოდ არ ვნანობ BOSCH GluePen-ის ყიდვას. იქნებ ეს მცირე არჩევანი ვინმეს დაეხმარება.
თქვენი რობოტის ასაწყობად სულაც არ არის აუცილებელი გქონდეთ მრავალფეროვანი და ძვირადღირებული ხელსაწყოები, თუმცა ეს რა თქმა უნდა აუმჯობესებს სამუშაოს ხარისხს და უფრო დიდ სიამოვნებას მოაქვს მისგან. საკმარისია გქონდეთ ჩვეულებრივი შედუღების უთო, რამდენიმე ხრახნიანი და საბურღი. ბოლოს და ბოლოს, ოდესღაც ამ სტატიის ავტორს, დიდი ხნის წინ, ხელთ ჰქონდა მხოლოდ ქლიბი, ჩაქუჩი, ორიოდე ხრახნიანი, სპილენძის მავთული, სამაგრი (ჯერ კიდევ სადღაც!) და ორი საბურღი, ცალი. სატელეფონო მავთულები და ბევრი ლურჯი ელექტრო ლენტი (ხშირად ადრე გამოყენებული), ეს სავსებით საკმარისი იყო უბრალო მანქანის შესაქმნელად, რომელიც ღილაკზე დაჭერისას პირდაპირ მოძრაობდა თავისით.
ძირითადი კომპონენტები
მკითხველთა მრავალი მოთხოვნის გამო, მე ვაძლევ ბმულებს (ebay/aliexpress) ძირითად კომპონენტებზე. სამუშაო ბმულები 2016 წლის სექტემბრის მდგომარეობით. ყველაფერი შევუკვეთე ექვსი თვის წინ (2016 წლის თებერვალი-მარტი), ამიტომ გირჩევთ უფრო შორს მიხედოთ - იქნებ ახლა უკეთეს ფასად იყიდოთ.
შასი, ძრავები, ბორბლები, შესაკრავები - პლატფორმა (ორი ფერის არჩევანი) + 4 * (80 მმ ბორბალი + შესაკრავები + ძრავა (სამი სიჩქარის არჩევანი))
ყურადღება მიაქციეთ შემდეგ კომპლექტს - 130 მმ ბორბალი + შესაკრავები + ძრავა ჰოლის სენსორით
ყურადღება მიაქციეთ ტევადობის ბატარეებს (მე მათთან რამდენჯერმე მიმუშავია - ამ ბატარეების რეალური და დეკლარირებული სიმძლავრე ჩვეულებრივ ემთხვევა, ანუ რეალურად აქვთ 3400 mAh!) - Panasonic NCR18650B 18650 / 3400 mAh / 3.7V / დაუცველი HC- მოდული. 06 5
0.9% საშინელებაა - სად არის მეტყველების კულტურა, წინადადებების ნორმალური აგებულება... ავტორს სინტაქსი და მორფოლოგია უნდა ისწავლოს! 2
5.9% მიჭირს პასუხის გაცემა, ან კომენტარებში აგიხსნით. 12
პლატფორმა, რომელიც აკმაყოფილებს მთელ რიგ მოთხოვნას: თავისუფალი გადაადგილება, დამატებითი აღჭურვილობის დაყენების და შესაძლებლობების გაფართოების შესაძლებლობა, ასევე გონივრული ღირებულება. ეს არის რობოტის პლატფორმა ან, უბრალოდ, თვალთვალის შასი, რომელსაც მე გავაკეთებ. ბუნებრივია, ინსტრუქციას ვაქვეყნებ თქვენს განსახილველად.
ჩვენ დაგვჭირდება:
Tamiya 70168 ორმაგი გადაცემათა კოლოფი (შეიძლება შეიცვალოს 70097)
- Tamiya 70100 როლიკებით და ტრეკის ნაკრები
- Tamiya 70157 პლატფორმა გადაცემათა კოლოფის დასამონტაჟებლად (შეიძლება შეიცვალოს 4 მმ პლაივუდის ნაჭერით)
- გალვანზირებული ფურცლების პატარა ნაჭრები
- პლაივუდი 10 მმ (პატარა)
- არდუინო ნანო
- DRV 8833
- LM 317 (ძაბვის სტაბილიზატორი)
- 2 LED (წითელი და მწვანე)
- რეზისტორები 240 Ohm, 2x 150 Ohm, 1.1 kOhm
- კონდენსატორი 10v 1000uF
- 2 ერთრიგიანი სავარცხელი PLS-40
- 2 PBS-20 კონექტორი
- ინდუქტორი 68uH
- 6 NI-Mn ბატარეა 1.2v 1000mA
- მამრობითი-ქალი ორი პინიანი კონექტორი თითო მავთულზე
- სხვადასხვა ფერის მავთულები
- ჯადოქარი
- როზინი
- შედუღების უთო
- ჭანჭიკები 3x40, 3x20, კაკალი და საყელურები მათთვის
- ჭანჭიკები 5x20, კაკალი და გამაგრებული კაკალი მათთვის
- საბურღი
- ლითონის საბურღი 3 მმ და 6 მმ
ნაბიჯი 1: დავჭრათ ლითონი.
ჯერ ლითონის ფურცლიდან (სასურველია გალვანზირებული) უნდა ამოვჭრათ ოთხი ნაწილი. ორი ნაწილი თითო სიმღერაზე. ამ ნიმუშის გამოყენებით, ჩვენ გამოვყავით ორი ნაწილი:
წერტილები მიუთითებს იმ ადგილებზე, სადაც საჭიროა ხვრელების გაბურღვა, ხოლო მის გვერდით მითითებულია ხვრელის დიამეტრი. როლიკებით დასაკიდისთვის საჭიროა 3 მმ ხვრელები, მათში მავთულის გადასახვევისთვის 6 მმ. ჭრისა და ბურღვის შემდეგ, თქვენ უნდა გაიაროთ ყველა კიდე ფაილით, არ დატოვოთ მკვეთრი კუთხეები. მოხარეთ 90 გრადუსით წერტილოვანი ხაზების გასწვრივ. Ფრთხილად იყავი! პირველ ნაწილს ვახვევთ ნებისმიერი მიმართულებით, მეორეს კი საპირისპირო მიმართულებით. ისინი უნდა იყოს სიმეტრიულად მოხრილი. არის კიდევ ერთი ნიუანსი: აუცილებელია ხვრელების გაბურღვა ხრახნებისთვის, რომლებიც ამაგრებენ ჩვენს ფირფიტებს ბაზაზე. ეს უნდა გაკეთდეს, როდესაც ბაზა მზად იქნება. ჩვენ ვათავსებთ სამუშაო ნაწილს ბაზაზე და აღვნიშნავთ ბურღვის ადგილებს ისე, რომ ხრახნები მოხვდეს ჩიპბორდის ცენტრში. ჩვენ ვაკეთებთ კიდევ ორ დეტალს მეორე განვითარების მიხედვით:





ნაბიჯი 2 მოამზადეთ ბაზა.
ჩვენ ვაწყობთ გადაცემათა კოლოფს თანდართული ინსტრუქციის მიხედვით. ჩვენ ხრახნიან მას პლატფორმაზე. თუ პლატფორმა არ არის, 4 მმ პლაივუდიდან ამოჭერით 53x80 მმ ოთხკუთხედი და მიამაგრეთ გადაცემათა კოლოფი. ვიღებთ 10 მმ პლაივუდს. ამოჭერით ორი მართკუთხედი 90x53 მმ და 40x53 მმ. პატარა ოთხკუთხედის შიგნით ამოვჭრით კიდევ ერთი ოთხკუთხედი, ისე რომ მივიღოთ ჩარჩო 8მმ კედლის სისქით.

ჩვენ ყველაფერს ვახვევთ, როგორც ნაჩვენებია ფოტოში:




პლატფორმის კუთხეებში გავბურღეთ 6მმ ხვრელები და ჩავსვით მათში ჩვენი 5x20 ჭანჭიკები და ზემოდან დავამაგრეთ თხილი. ისინი საჭიროა სხვადასხვა მექანიზმების ან დაფების შემდგომი დამაგრებისთვის. მოხერხებულობისთვის, ჩვენ დაუყოვნებლივ ვაწებებთ LED- ებს:


ნაბიჯი 3 ელექტრიკოსი.
კონტროლისთვის გამოვიყენებთ Arduino Nano-ს. DVR 883 ძრავის დრაივერი ჩვენ ვაწყობთ ყველაფერს მიკროსქემის დაფაზე სქემის მიხედვით.

L1 - ინდუქტორი და C1 საჭიროა Arduino ძაბვის სტაბილიზაციისთვის. რეზისტორები R1 და R2 ძრავების წინ არის დენის შემზღუდველი, მათი ღირებულება უნდა შეირჩეს კონკრეტული ძრავებისთვის. ისინი კარგად მუშაობენ ჩემთვის 3 ohms-ზე. LM317 საჭიროა ბატარეების დასატენად. შეყვანის მიწოდება შესაძლებელია ძაბვით 9,5 ვ-დან 25 ვ-მდე. R3 – 1,1 kOhm R4 – 240 Ohm. მარცხნივ „ქინძისთავები“ გამოიყენება სხვადასხვა ტიპის მოწყობილობების (Bluetooth, 433 MHz საკომუნიკაციო მოდული, IR, Servo და ა.შ.) შემდგომი დასაკავშირებლად. ელექტროენერგიის მიწოდებისთვის გამოვიყენებთ 6 Ni-Mn 1.2v 1000mA ბატარეას, რომლებიც შედუღებულია სერიულად და დახვეული ელექტრო ლენტით.

ნაბიჯი 4: შეაგროვეთ ბაზა.
ჩვენ ვიღებთ ჩვენს ბაზას და ვაწებებთ დაფას მასზე ორმხრივი ლენტის გამოყენებით. ლითონის ნაწილები პირველი განვითარების მიხედვით საჭიროა გვერდებზე ძირზე მცირე ზომის ხრახნებით, მოხრილი ნაწილებით გარეთ. ფრთხილად დახურეთ იგი ისე, რომ ყველაზე გარე 6 მმ ხვრელი მოერგოს გადაცემათა კოლოფის გამომავალ ღერძს, ნაწილის ქვედა ნაწილი უნდა იყოს ბაზის პარალელურად და სიმეტრიული მეორე მსგავს ნაწილთან მიმართებაში. შედეგი უნდა იყოს:




იმისათვის, რომ ჩვენს ხელნაკეთ პროდუქტს მივცეთ ესთეტიკური გარეგნობა, დავამატოთ რამდენიმე დეტალი. არ არის სავალდებულო. თეთრი პლასტმასისგან ამოვჭრით 110x55 მმ მართკუთხედს და ვახვევთ ისე, როგორც ფოტოზეა ნაჩვენები. კუდი ასევე სურვილისამებრ არის, მაგრამ მე მომეწონა მისი გარეგნობა და მაგარი ქნევა მოძრაობისას:


ეს საფარი ფარავს გადაცემათა კოლოფს ისე, რომ ჭუჭყი არ მოხვდეს მასში და ნაკლებ ხმაურს გამოსცემს. შემდეგი, ჩვენ ასევე ამოვიღეთ ოთხკუთხედი 52x41 მმ თეთრი პლასტმასისგან. ჩვენ ვაკეთებთ ხვრელებს Arduino-ს და გამორთვის ღილაკის დასაკავშირებლად, როგორც ფოტოში:

ჩვენ ყველაფერს ვაწებებთ ორმხრივ ფირზე:

სილამაზის სტიკერი.

ეს ორი ნაწილი შეიძლება დამზადდეს თითქმის ნებისმიერი მასალისგან, რაც ხელთ გაქვთ. ეს შეიძლება იყოს სქელი მუყაო (რომელიც შემდეგ შეიძლება იყოს მოხატული), ბოჭკოვანი დაფა, თხელი პლაივუდი ან ნებისმიერი ფერის პლასტმასის ფურცელი. არ დაივიწყოთ ბატარეები. დააწებეთ ისინი ორმხრივი ლენტით ბაზის მარჯვენა მეტალის ნაწილზე:

ქიაყელის ნაბიჯი 5.
აქ დაგვჭირდება ჩვენი ბლანკები მეორე სკანირებისთვის. 3 მმ ნახვრეტებში ჩავსვამთ ჭანჭიკებს 3x20 ნახევრად ცილინდრული თავით. საყელურებს ვასხამთ და თხილს ვამაგრებთ.
გავეცანით 105-Bender ZiChip მოწყობილობას, ვისწავლეთ Tuner პროგრამასთან მუშაობა და შევქმენით რამდენიმე მარტივი სკრიპტი. იმისათვის, რომ გადავიდეთ და ვაჩვენოთ, თუ როგორ მუშაობს 105-Bender firmware ძრავებთან, დაგვჭირდება ურიკა.
მოწყობილობის გამართვისთვის მე გამოვიყენე ჩემი, მაგრამ თქვენთვის, ბლოგის მკითხველებისთვის, ეს არ არის ძალიან შესაფერისი ვარიანტი. ამიტომ გადაწყდა არდუინოს პროექტებისთვის მზა ურიკის გამოყენება მოწყობილობის დემონსტრირებისთვის.
მაღაზიამ მომცა ამ პროექტის კალათა და მოდულები. DiyLab . ამ მაღაზიაში შეგიძლიათ შეიძინოთ ბევრი სხვა საინტერესო რამ.
ურიკის ნაკრები შემდეგია
როგორც გესმით, ეტლის გარეგნობას მნიშვნელობა არ აქვს. თქვენ შეგიძლიათ გამოიყენოთ სრულიად განსხვავებული დიზაინი. ეს შეიძლება იყოს 4 ბორბლიანი ურიკა ან თუნდაც მცოცავი ურიკა.
თავად კალათის გარდა, ჩვენ ასევე გვჭირდება:

- Arduino დაფა (Uno ან Nano)
- L298N ძრავის მძღოლი (ან სხვა ტიპის)
- ფოტოდეტექტორი და IR დისტანციური მართვა (შეგიძლიათ გამოიყენოთ საყოფაცხოვრებო დისტანციური მართვის პულტი და TSOP4836)
- პიეზო ემიტერი ან პატარა დინამიკი
- სინათლის დიოდი
— პურის დაფა და დამაკავშირებელი მავთულები (ინსტალაციის გამარტივებისთვის)
ეტლის აწყობამ და მოდულების ერთმანეთთან დაკავშირებამ არ უნდა გამოიწვიოს რაიმე სირთულე. მოდულები უნდა იყოს დაკავშირებული სქემის მიხედვით

გამოიყენეთ პურის დაფა, რომ დააკავშიროთ ან დააკავშიროთ ყველაფერი მავთულით ერთდროულად - როგორც მე გავაკეთე. მოდულების განლაგება დამოკიდებულია მხოლოდ თქვენზე - გააკეთეთ ის, რაც თქვენთვის ყველაზე მოსახერხებელია.



ფარებად გამოიყენება 3 ვატიანი LED-ები ორიგინალური კოლიმატორებით. სერიულად დაკავშირებული ორი ასეთი LED-ის გამოყენებისას, მათთვის დრაივერი არ არის საჭირო - 6 ვოლტზე კვებისას დენი არ აღემატება ნომინალურ მნიშვნელობას. ასევე შეიძლება გამოყენებულ იქნას ერთვატიანი LED-ები. საველე ეფექტის ტრანზისტორი გამოიყენება როგორც გასაღები მაღალი სიმძლავრის LED-ებისთვის. დინამიკი უნდა იყოს დაკავშირებული 10 - 100 μF კონდენსატორის საშუალებით
ტროლეი აწყობილია. შემდეგ სტატიაში ჩვენ მას გავუშვით და გასწავლით როგორ დაემორჩილოთ დისტანციური მართვის ბრძანებებს.
(ეწვია 4275-ჯერ, 1 ვიზიტი დღეს)

დღეს ვიწყებ სტატიების გამოქვეყნებას, რომელიც ეძღვნება საკუთარი მობილური რობოტის შექმნას. საოჯახო საბჭოზე გადაწყდა, რომ მას სახელი რობოტოში დაარქვეს, რის გამოც ჩემს ბლოგს ასე დავარქვი. მისი შექმნის მიზანია რობოტული სისტემების სხვადასხვა ალგორითმისა და ელემენტების პრაქტიკაში შესწავლა.
ამ დროისთვის, ჩემი რობოტი არის ოთხბორბლიანი პლატფორმა, რომელზეც დამონტაჟებულია მიკროკონტროლერის დაფა და ეკიდა რამდენიმე სენსორს და ინტერფეისს მომხმარებლის ურთიერთქმედებისთვის. პროგრამული უზრუნველყოფა ჯერ კიდევ საწყის ეტაპზეა, ამიტომ დეტალურად გავაანალიზებ რა და რატომ არის დანერგილი ამ მომენტში და თანდათან გადავალ, დავამატებ ფუნქციონირებას და მივანიჭებ მას „ინტელექტით“. ეს ჩემი პირველი რობოტია, ამიტომ, შესაძლოა, მისი შექმნის ზოგიერთი ეტაპი იყოს მცდარი ან ჩიხი.
იდეა
იდეა, როგორც პირველი მიახლოება, ასე გამოიყურება: ავტონომიური რობოტი შემდეგი მახასიათებლებით:
- 4 ბორბლიანი პლატფორმა
- შიდა გამოყენება (ბინა)
- დაბრკოლებების იდენტიფიცირების უკონტაქტო მეთოდები შეჯახების თავიდან ასაცილებლად
- კონტროლის რეჟიმები:
- ოფლაინ „შემთხვევითი გასეირნების“ რეჟიმი ოთახის რუქის შესაქმნელად
- დისტანციური მართვის რეჟიმი
- ხმოვანი ბრძანების შესრულების რეჟიმი ხმის ამოცნობით
- ბატარეის დატენვის მონიტორინგი და თვითდატენვა
- ინფორმაციის ჩვენება სიმბოლო LCD ეკრანზე
- ხმოვანი სიგნალიზაცია
რობოტის შასი
როგორც შასი, მე გადავწყვიტე გამომეყენებინა შეძენილი ოთხბორბლიანი პლატფორმა წმინდა ეკონომიკური მიზეზების გამო (როგორც არ უნდა მეგონა, ის უფრო ძვირი ღირდა ნაწილებად და ეს არის ერთ-ერთი ყველაზე იაფი, რაც მე ვიპოვე). ჩემი არჩევანი დაეცა DAGU 4WD შასის ნაკრების შასიზე, რომელიც არის 4 ბორბლიანი პლატფორმა ძრავებით. ასე გამოიყურება პაკეტი.

სხვადასხვა დანართების დამონტაჟების პლატფორმები დამზადებულია წითელი აკრილის მინისგან, დიდი რაოდენობით სამონტაჟო ხვრელებით სენსორების, კონტროლერების და სერვოძრავების დასაყენებლად. აკრილის მინა, უნდა ითქვას, რომ ძალიან მარტივად იჭრება, ასე რომ, მაშინაც კი, თუ რამე არ მოხვდება მზა ხვრელებს მომავალში, ყოველთვის შეგიძლიათ მარტივად გააკეთოთ დამატებითი. დისკები რეზინისაა. კომუტატორის ძრავები პლასტიკური გადაცემათა კოლოფით.
დაფები
ზომები: 175 x 109 x 3 მმ
დაფებს შორის მანძილი (ჩართული თაროების სიმაღლე): 24 მმ
მიწის კლირენსი: 45 მმ
Დისკები
ბორბლის დიამეტრი: 67 მმ
რგოლის სიგანე: 26 მმ
ძრავები
ძაბვა: 4,5 - 7,2 ვ
უსაქმურობის სიჩქარე: 90 ± 10 rpm
დატვირთვის გარეშე დენი: 190 mA (მაქს. 250 mA)
ბრუნვის მომენტი: 0,8 კგ სმ
მაქსიმალური დენი: 1A
აწყობას დაახლოებით ოცი წუთი სჭირდება. აწყობილი შასი ასე გამოიყურება:



მართალი გითხრათ, ძრავებთან ჩასაფრებული მქონდა. ეს ძრავები არ არის შექმნილი ენკოდერების მისაღებად, რაც ჩემთვის მნიშვნელოვანია, რადგან ვაპირებ გამოვიყენო ენკოდერები უფრო ზუსტი პოზიციონირებისთვის უკუკავშირის უზრუნველსაყოფად. ამიტომ, დიდი ალბათობით, თუ ამ ძრავების გადაკეთება ვერ მოხერხდება, მომავალში ძრავებს სხვაზე შევცვლი.
საერთო ჯამში, აწყობილი პლატფორმა საკმაოდ ლამაზად გამოიყურება. ენკოდერების პრობლემა რომ არ იყოს 100%-ით კმაყოფილი ვიქნებოდი.
როგორ შეაფასებთ ამ პუბლიკაციას?
» შასი MINI-SUMO რობოტისთვის ნაწილი 1
შასი MINI-SUMO რობოტისთვის ნაწილი 1 |
|
შასი MINI-SUMO რობოტისთვის. ვიწყებთ სტატიის გამოქვეყნებას მინი სუმოს რობოტის დამზადებაზე. სტატია შედგება რამდენიმე ნაწილისგან, რომელთაგან თითოეული შეიცავს დეტალურ შეკრების ინსტრუქციას. ამ ნაწილში მოცემულია რობოტის შასის აწყობის აღწერა. ინტერნეტში უამრავი ინფორმაციაა, რომელიც შეიცავს გარკვეული რობოტების აღწერას. ეს სტატიები მოიცავს აწყობილი რობოტის ფოტოებს, მისი მოძრაობის ვიდეო კადრებს და პროგრამის კოდს. მაგრამ, როგორც წესი, ჩვენ ვხედავთ მზა ასლებს და თავად შექმნის პროცესი "იდეიდან მოდელამდე" რჩება კულისებში. ზოგჯერ სწორედ ეს დეტალური პრეზენტაცია აკლია და ართულებს ჟურნალებში ან ვებგვერდებზე მოცემული კონსტრუქციების გამეორებას. მინდა შემოგთავაზოთ მასალა, თუ როგორ უნდა განვავითაროთ რობოტის შასი მინი-სუმოს შეჯიბრებისთვის. ინფორმაცია ძალიან სასარგებლო იქნება ყველა დამწყები დეველოპერისთვის, ასევე სკოლის მოსწავლეებისთვის და სტუდენტებისთვის. შესაძლოა, გამოცდილ დიზაინერებს შეეძლებათ იპოვონ საინტერესო იდეები თავისთვის, მით უმეტეს, რომ ეს რობოტი დამზადებულია ხელმისაწვდომი და ხელმისაწვდომი მასალებისგან, ხოლო შეძენილი ნაწილები საკმაოდ იაფია. |
1. კონკურსის წესები.
პირველ რიგში, უნდა გავეცნოთ მინი-სუმოს შეჯიბრების წესებს. ისინი აქ არიან . ახლა ჩვენ ვიცით, რომ ჩვენი მომავალი რობოტის ზომები და მისი ამობურცული ნაწილები გაშვების დროს არ უნდა აღემატებოდეს 10x10 სმ.
2.ნაწილების მომზადება.
ამ ეტაპზე აუცილებელია გადაწყვიტოს ელემენტარული ბაზა, აი რა ნაწილებისგან შედგება ჩვენი რობოტი: ძრავები, ბორბლები, მიკროკონტროლის დაფა, ხაზის სენსორები და ა.შ.
3. ძრავები და ბორბლები.
ჩვენ ვირჩევთ ძრავებს გადაცემათა კოლოფით და მცირე გადაცემათა კოეფიციენტით. ჩინური მაღაზია დაგვეხმარება. ჩვენი რობოტი უნდა იყოს ზომიერად სწრაფი, რათა არ გაფრინდეს რინგიდან სიჩქარით და საკმარისად ძლიერი, რათა მოწინააღმდეგე გამოაგდოს. ბორბლებისთვის ავიღე ლილვაკები ფულის მთვლელი მანქანის მოძრავი მექანიზმიდან. აღმოჩნდა, რომ მათ ჰქონდათ შესაფერისი დიამეტრი და კარგი რეზინის საფარი, რომელიც უზრუნველყოფს ბეჭდის ზედაპირზე საჭირო დაჭერას. როგორც გესმით, ბორბლები შეიძლება იყოს აბსოლუტურად ნებისმიერი და დამზადებული ნებისმიერი მასალისგან.
4. RING EDGE სენსორები.
იმისათვის, რომ ჩვენმა რობოტმა არ დატოვოს რგოლის საზღვრები, უნდა აღვჭუროთ იგი სპეციალური სენსორებით (ნახ. 2), რომლებიც ხელს შეუშლის რობოტს მის გადაკვეთაში. ასეთი სენსორების მუშაობის პრინციპი დეტალურად არის აღწერილი Აქ . მოკლედ, მათი პრინციპი დაფუძნებულია ზედაპირების ამრეკლავ თვისებებზე. მუქი ზედაპირი ირეკლავს ნაკლებ სინათლეს, ვიდრე მსუბუქი. ინფრაწითელი LED გამოიყენება როგორც სინათლის გამოსხივება, ხოლო ფოტოტრანზისტორი, რომელიც მგრძნობიარეა ინფრაწითელი გამოსხივების მიმართ, როგორც მიმღები. კარგად, შავია თუ თეთრი, მიკროკონტროლერი ამას გაარკვევს, მაგრამ ამაზე მოგვიანებით.
ნახ. 2-ზე ნაჩვენები სენსორები აღებულია და აღებულია სალარო აპარატის ქვითრების პრინტერის ქაღალდის მართვის განყოფილებიდან. მოქნილი მავთულები ჩანაცვლებულია კონტაქტებით კავშირის გამარტივებისთვის. შეიძლება გამოყენებულ იქნას სხვა სენსორები, როგორიცაა ნახ. 3.


ნახ.2 ნახ.3.TCRT5000 სენსორი
სენსორი საკმაოდ იაფია და ძალიან გავრცელებულია რადიო კომპონენტების ონლაინ მაღაზიებში. თქვენ შეგიძლიათ გააკეთოთ თქვენი საკუთარი სენსორები ცალკეული LED-ებიდან და ფოტოტრანზისტორებიდან, მაგრამ თქვენ უბრალოდ უნდა მოაწყოთ დანაყოფი მათ შორის, როგორც ფიგურაში, რათა თავიდან აიცილოთ ტრანზისტორის გვერდითი ზემოქმედება და მისი ცრუ მოქმედება.
5.დაბრკოლების სენსორები.
მტრის გამოსავლენად, ჩვენ გვჭირდება სენსორი, რომელსაც შეუძლია აღმოაჩინოს დაბრკოლება ჩვენს წინ. რობოტიკაში ორი ტიპის სენსორები ძალიან გავრცელებულია: ულტრაბგერითი და ინფრაწითელი. ყველაზე იაფი სენსორები არის ულტრაბგერითი. სწორედ ასეთ სენსორს გამოვიყენებთ. ის, რა თქმა უნდა, ზომით უფრო დიდია, ვიდრე ინფრაწითელი, მაგრამ იდეალურია დავალებისთვის და მარტივია დაკავშირება, ინსტალაცია და დაპროგრამება.

ბრინჯი. 4 ულტრაბგერითი HC-SR04
ასეთი სენსორის მუშაობის პრინციპი არის ულტრაბგერითი ტალღის ასახვა დაბრკოლებიდან. ღამურებსა და დელფინებს აქვთ მსგავსი სონარის სისტემები. ჩვენი სენსორის ერთი თვალი ასხივებს ულტრაბგერით ტალღას, ხმა აღწევს დაბრკოლებას, აირეკლება მისგან და ამ სიგნალს იღებს სენსორის მეორე თვალი. იმის ცოდნა, თუ რა დრო სჭირდება სიგნალის დაბრუნებას, ადვილია გამოვთვალოთ მანძილი დაბრკოლებამდე. არ ინერვიულოთ, ჩვენ არ გვჭირდება რაიმეს გამოთვლა სენსორის დაფას უკვე აქვს მიკროკონტროლერი, რომელიც ამუშავებს ამ გამოთვლებს. გამოსავალზე მივიღებთ წმინდა მნიშვნელობას სანტიმეტრებში ან სხვა მითითებულ მნიშვნელობებში.
6.ძრავის მძღოლი.
ნებისმიერი ელექტროძრავა არის დენის შესანიშნავი მომხმარებელი და, რა თქმა უნდა, შეუძლებელია მიკროკონტროლერის ქინძისთავებთან დაკავშირება. დიდი დატვირთვები დაკავშირებულია ძლიერი ტრანზისტორებით. ჩვენ ასევე შეგვეძლო ამ გზით ძრავების დაკავშირება, მაგრამ ტრანზისტორს შეუძლია დაუშვას დენი მხოლოდ ერთი მიმართულებით. ხაზის მიმდევარი რობოტისთვის ეს იდეალურია, რადგან ის მხოლოდ წინ მოძრაობს, მაგრამ ჩვენს შემთხვევაში, მინი სუმო რობოტი უნდა მოძრაობდეს როგორც წინ, ასევე უკან. აქ ერთი ტრანზისტორი არ არის საკმარისი; ამიტომ, ჩვენ არ ვეძებთ პრობლემებს და დამატებით ხარჯებს და ავიყვანთ მზა დრაივერს ორი ძრავისთვის.

ეს იაფი დრაივერი განკუთვნილია 600Ma ძრავის დენისთვის, ჩვენს შემთხვევაში ეს საკმარისი იქნება. თითოეულ მიკროსქემას შეუძლია ძრავის გადაქცევა ერთი ან მეორე მიმართულებით. დრაივერი კონტროლდება ჩვეულებრივი ლოგიკური სიგნალებით და დრაივერი პირდაპირ უკავშირდება კონტროლერს. მძღოლის კიდევ ერთი უპირატესობა არის ძრავებისთვის ცალკე ელექტრომომარაგების გამოყენების შესაძლებლობა. ეს თავიდან აიცილებს ჩარევას მოძრავი ძრავებისგან, ისევე როგორც ძრავების გამოყენებაზე მეტი სიმძლავრით, ვიდრე მიკროსქემის სიმძლავრე. კარგად, PWM სიგნალის კონტროლი - ეს საშუალებას მოგცემთ დაარეგულიროთ ბრუნვის სიჩქარე.
7.შასის დამზადება.
შემოქმედებითი მუშაობის დროა. მსუბუქი და გამძლე კორპუსის შესაქმნელად გვჭირდება PVC პლასტმასი. რა არის და სად ვიშოვო? PVC პლასტმასი არის მსუბუქი, საკმაოდ გამძლე და ადვილად დამუშავებული თეთრი მასალა. მას ფართოდ იყენებენ რეკლამის განმთავსებლები, ისინი იყენებენ მას, როგორც Oracle ფილმის სტიკერის საფუძველს დაბეჭდილი სურათით. და მათ ყოველთვის აქვთ ნარჩენები! ჩვენ მხოლოდ ცოტას ვითხოვთ.

ასევე დაგვჭირდება საკანცელარიო დანა, ორმხრივი ლენტი, სუპერ წებო, თხელი მუყაო, ქვიშა და რკინის სახაზავი. PVC პლასტმასის დაჭრა შესაძლებელია იდეალურად დანით და მყარად დაწებება სუპერ წებოთი. ნაკერები და დარღვევები შეიძლება ადვილად დამუშავდეს ქვიშის ქაღალდით. ნახატებისთვის გამოვიყენებთ სასკოლო რვეულიდან რეგულარულ ფურცელს. პირველი, რაც ჩვენ გავაკეთებთ, არის რობოტის ძირის მონიშვნა და ყველა ჩვენი ელემენტის განთავსება 9,5x9,5 სმ გვერდების მქონე ოთხკუთხედზე, შეგიძლიათ იკითხოთ, რატომ არ არის ჩვენი გვერდი 10 სმ, როგორც ეს წესებია? დამიჯერეთ, ჯობია, მითითებულ ზომებზე ცოტა პატარა იყოს, რადგან თუ ზომები ოდნავ დიდია, მაშინ ჩვენი რობოტი უბრალოდ ვერ გაივლის საკვალიფიკაციო შერჩევას. ისე, თუ ძალიან გინდა, მაშინ შეგიძლია ამის გაკეთება ზომებში 10x10 სმ.

ჩვენ გვაქვს ცარიელი საზომი 9.5x8 სმ. ეს იქნება ჩვენი ჩარჩო ან ქვედა. ჩვენ ვიყენებთ გამოტოვებულ 1,5 სანტიმეტრს ერთ მხარეს რგოლის კიდეების სენსორების დასაყენებლად. ბორბლებს ისე ვათავსებთ, რომ ისინი სხეულის გვერდით ნაწილებთან ერთად იყოს და არ გამოვიდეს გარეთ. რაც უფრო ნაკლებია ამობურცული ნაწილები, მით უფრო გაუჭირდება მტერს რაიმეს დაჭერა.

ჩვენი შაბლონის გამოყენებით, ჩვენ ამოვიღეთ შაბლონები მუყაოსგან. ძრავებს ვამაგრებთ ორმხრივი წებოვანი ლენტით და ვამუშავებთ გვერდითა კედლებს. მე გადავწყვიტე, რომ რობოტის სხეული "ჩილის" სახით გამეკეთებინა, ამას უკვე შეგვიძლია ვუწოდოთ კლასიკა მინი-სუმოს რობოტებს შორის. მაგრამ თქვენ შეგიძლიათ აირჩიოთ აბსოლუტურად ნებისმიერი დიზაინი. შეგიძლიათ ექსპერიმენტი გააკეთოთ რამდენიც გსურთ, ყველა ექსპერიმენტისთვის საკმარისი მუყაოა.
ისე, ჩვენი მუყაოს მოდელი მზად არის და ყველა დეტალი მორგებულია. თქვენ შეგიძლიათ დაიწყოთ მათი დამზადება პლასტმასისგან.
ᲛᲜᲘᲨᲕᲜᲔᲚᲝᲕᲐᲜᲘ! საკანცელარიო დანა არის ძალიან ბასრი! იყავით უკიდურესად ფრთხილად. დანის სახელური უნდა იყოს კომფორტული და მჭიდროდ მოთავსდეს თქვენს ხელში. ბასრი ან სახიფათო იარაღებით მუშაობისას ბავშვები არ უნდა დარჩეს უყურადღებოდ!
არ დაგავიწყდეთ, რომ პლასტმასს აქვს თავისი სისქე და გასათვალისწინებელია მოდელირებისას, რათა არ გადააჭარბოს დაგეგმილ ზომებს. ჩემი პლასტმასის სისქე 3 მმ-ია და თუ გვერდითა კედლებს ვაწებებ, როგორც ნაჩვენებია ნახ. 9, მაშინ ჩემი რობოტის სიგანე 10 სმ-ზე ოდნავ მეტი იქნება.

თუ გვერდითა კედლებს ზემოდან წებავთ, ნახ. 10, მაშინ მივიღებთ მახინჯ ნაკერს მთელ სიგრძეზე. რათქმაუნდა შეიძლება დაფქვა, მაგრამ თუ უკვე ამოჭრით ბორბლების თაღები, სხვა პრობლემას შეგვექმნება - თაღი ოვალურად გამოიყურება, რომელიც ასევე ცუდად გამოიყურება.

ნახ. 11 გვიჩვენებს, თუ როგორ ვიმოქმედებთ. ძირიდან იჭრება პლასტმასის ფურცლის სისქის ტოლი სიგანის ზოლი.

იგივე ზოლი გამოყენებული იქნება ნაკერების გასამაგრებლად. ბრინჯი. 12.


სურ. 12. სურ. 13.
მას შემდეგ, რაც წებო მთლიანად გაშრება, ნაკერს ვასხამთ. სხვათა შორის, სუპერ წებო ან გელი შეიძლება იმოქმედოს როგორც საცობი. საკმარისია ნაკერი გარედან ისევ გადაიფაროს და გაშრეს, შემდეგ ქვიშაზე. შეღებვის შემდეგ ნაკერი არ ჩანს.
ვნიშნავთ ადგილს ძრავებისთვის და ვაწებებთ მათ. ჯერ მავთულები ვამაგრებთ ძრავებს, შემდეგ ამის გაკეთება ადვილი არ იქნება. ბრინჯი. 13

ახლა ჩვენ ვამაგრებთ რგოლის კიდეების სენსორებს, როგორც ნაჩვენებია ნახ. 14. ქვემოდან ვაწებებთ საყრდენ ზოლს, ის მესამე საყრდენი წერტილის ფუნქციას შეასრულებს და რგოლის ზედაპირის გასწვრივ სრიალებს. ზედაპირთან მაქსიმალური შეხება მოგვცემს უპირატესობას მტრის ქვეშ ჩავცუროთ რაც შეიძლება დაბალი.

ცენტრში ჯერ კიდევ ბევრი ადგილია დამატებითი სენსორების დასაყენებლად, ვთქვათ კიდევ სამი. მომავალში, ამის შემდეგ შესაძლებელი იქნება რობოტის უსაფრთხოდ გაშვება ხაზის გასაყოლებლად.

ჩვენ ვაგრძელებთ განლაგებას. ამჯერად ვაკეთებთ „ვერძს“ დისტანციის სენსორის ადგილით. გთხოვთ გაითვალისწინოთ ნახ. 16 ძრავა უკვე დაფარულია პლასტმასით. ეს თავიდან აიცილებს შემთხვევით მოკლე ჩართვას ძრავების ზედაპირზე და დაიცავს გადაცემათა კოლოფებს მტვრისგან. მაგრამ თავად ძრავების დამატებითი ფიქსაცია არ დააზარალებს. მიზანშეწონილია გადაცემათა კოლოფზე წვეთი ლუბრიკანტის დადება, სანამ ისინი მთლიანად არ დაიფარება პლასტმასით.

ზომების საბოლოო კორექტირების შემდეგ, ჩვენ ამოვიღეთ "ვერძის" ფირფიტა პლასტმასისგან. ჩვენ ვაყალიბებთ სადგამებს მანძილის სენსორისთვის და ვაწებებთ მათ ადგილზე.

ასე გამოიყურება მინი სუმოს რობოტის კორპუსის მზა ვერსია. რჩება მხოლოდ მისი მომზადება ფერწერისთვის ბორბლების, სენსორების და მავთულის ლენტით შეფუთვით. პლასტმასი ძალიან კარგად ხატავს. ფერწერისთვის აიღეთ მქრქალი შავი საღებავის ქილა.
გაგრძელება მეორე ნაწილში.
თუ თქვენ გაქვთ რაიმე შეკითხვები, დაწერეთ ფორუმზე ან ონლაინ ჩატში რობოტიკის შესახებ, ჩვენ განვიხილავთ მათ!
ყურადღება! აკრძალულია მასალის სრული ან ნაწილობრივი კოპირება ადმინისტრაციის ნებართვის გარეშე!







